莫西3D模型平台,坚持走精品路线!
下载图纸请先
【登录】
或
【注册】
微信登录
QQ登录
免费Solidworks教程网-Solidworks视频教程-莫西网
莫西网
3D模型下载
免费图纸
会员模型
精品图纸
CAD图纸
Solidworks
UG视频教程
ProE
机械制图
当前位置:
莫西网
>
会员模型
>
Solidworks模型
>
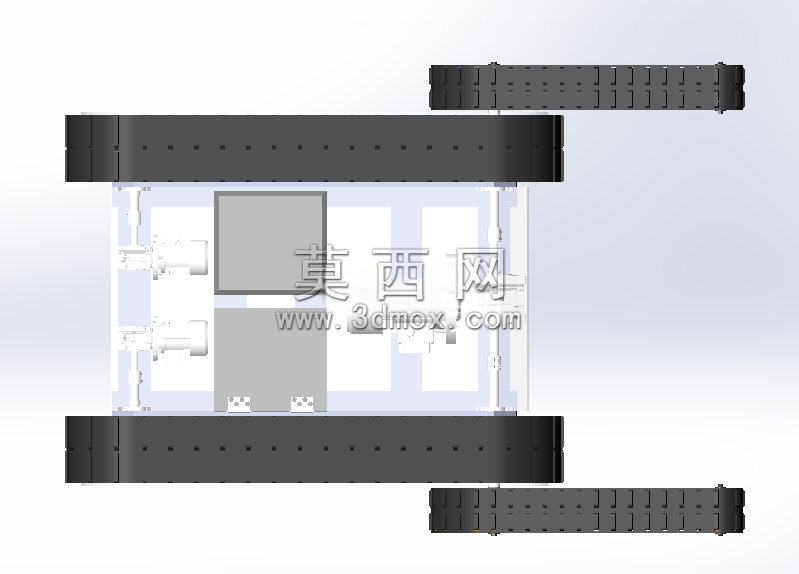
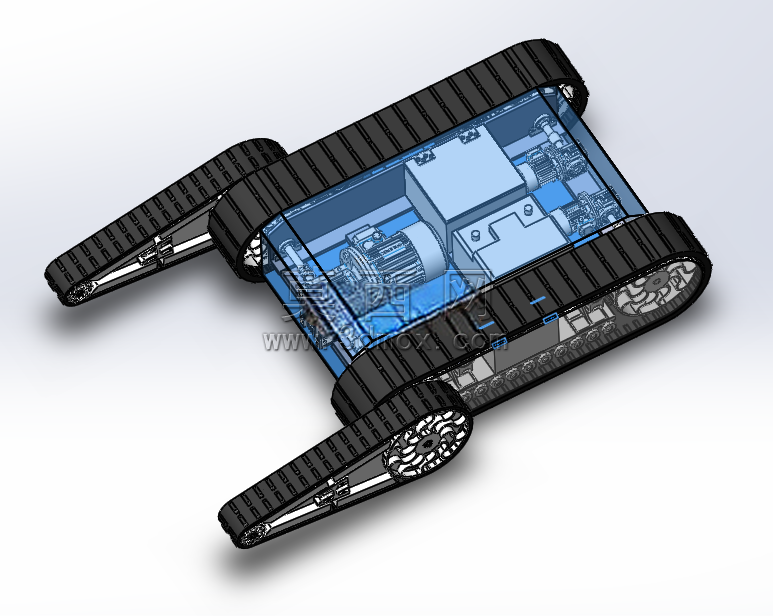
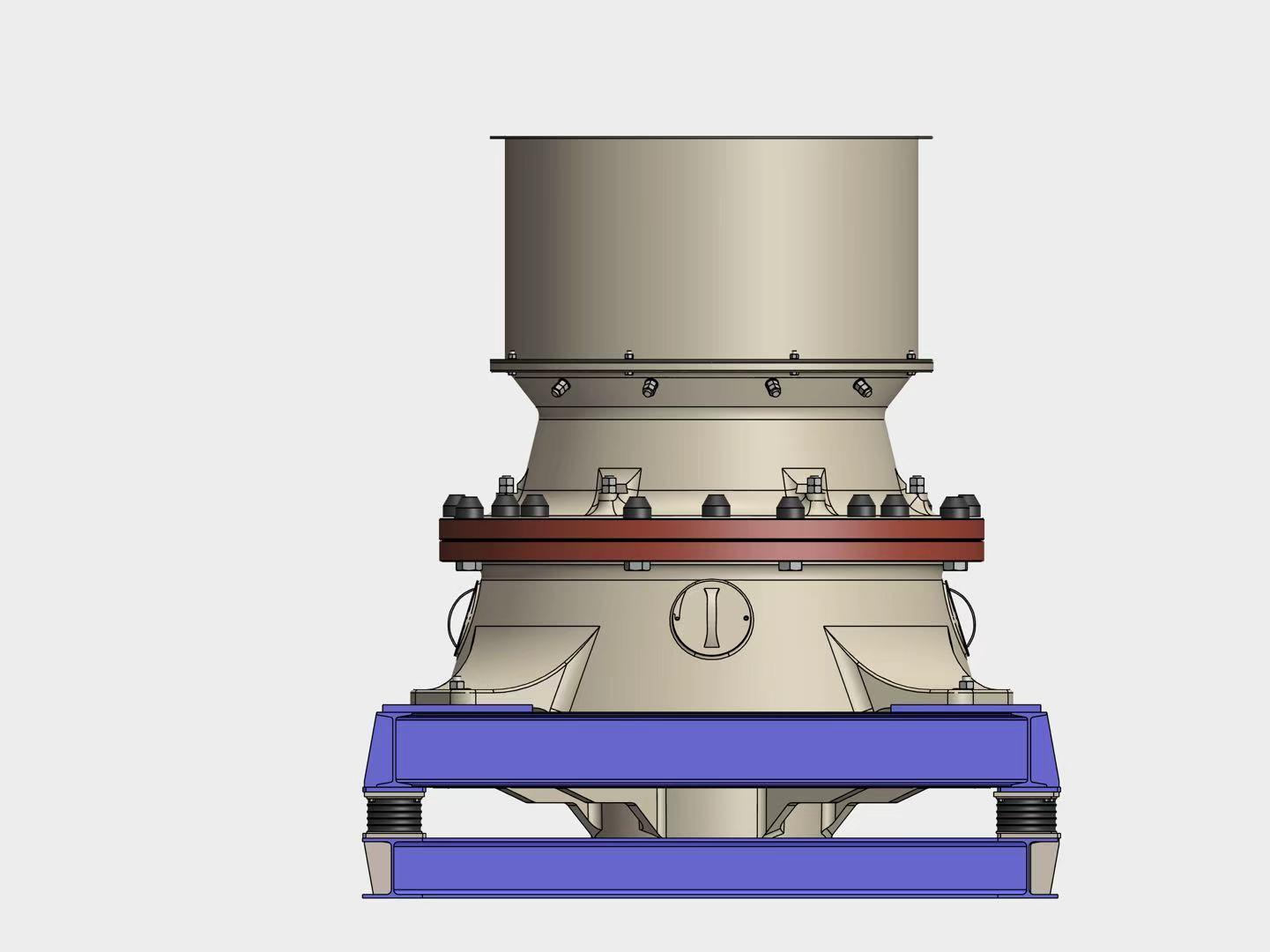
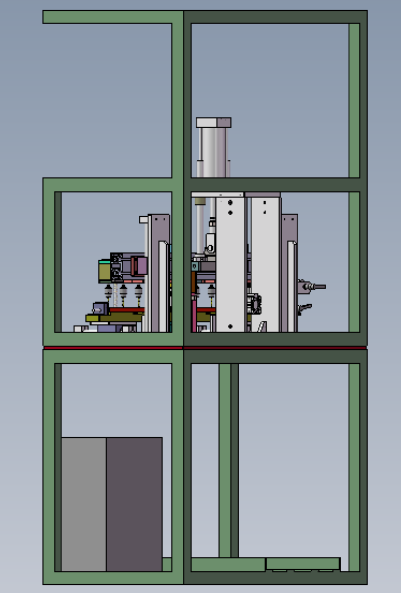
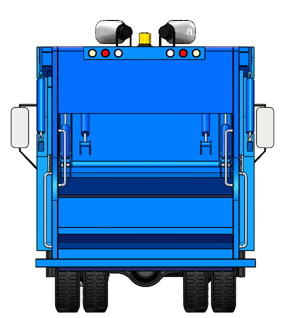
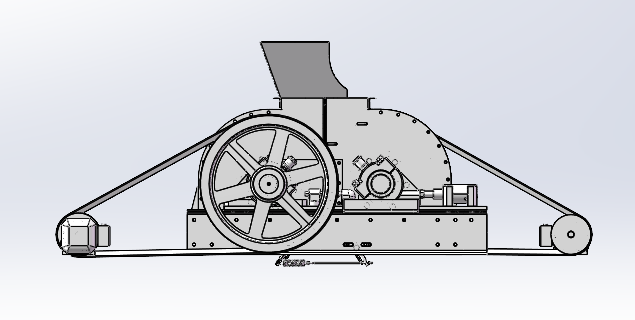
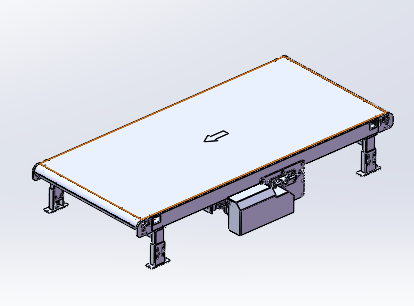
双摇臂履带底盘
栏目分类:
Solidworks模型
发布时间:2024-10-15
收藏
挑错
推荐
作品图片
图片展示共
3
张
针对地震、火灾等灾后现场,分析国内外灾后救援机器人的研究现况,分析各类型救援越障机器人的优缺点,比较得出履带式机器人在复杂的环境中能较好地发挥机动性能,越过各种复杂地形,达到救援的目的。针对履带式机器人的体积大质量大的问题,提出对履带结构进行增加鳍状履带的方法,对可变形的履带进行研究,改善履带式机器人的弊端,提高其可行性和稳定性。
标签:
------分隔线----------------------------
上一篇:
塔式起重机三维
下一篇:
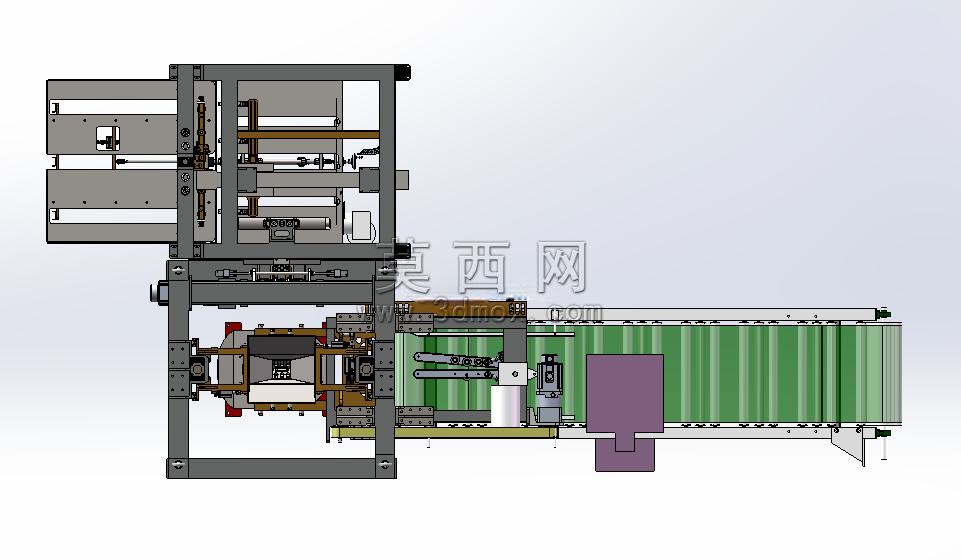
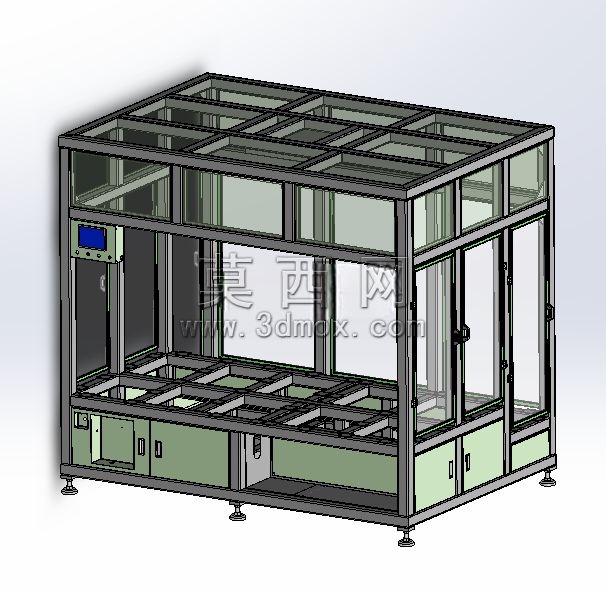
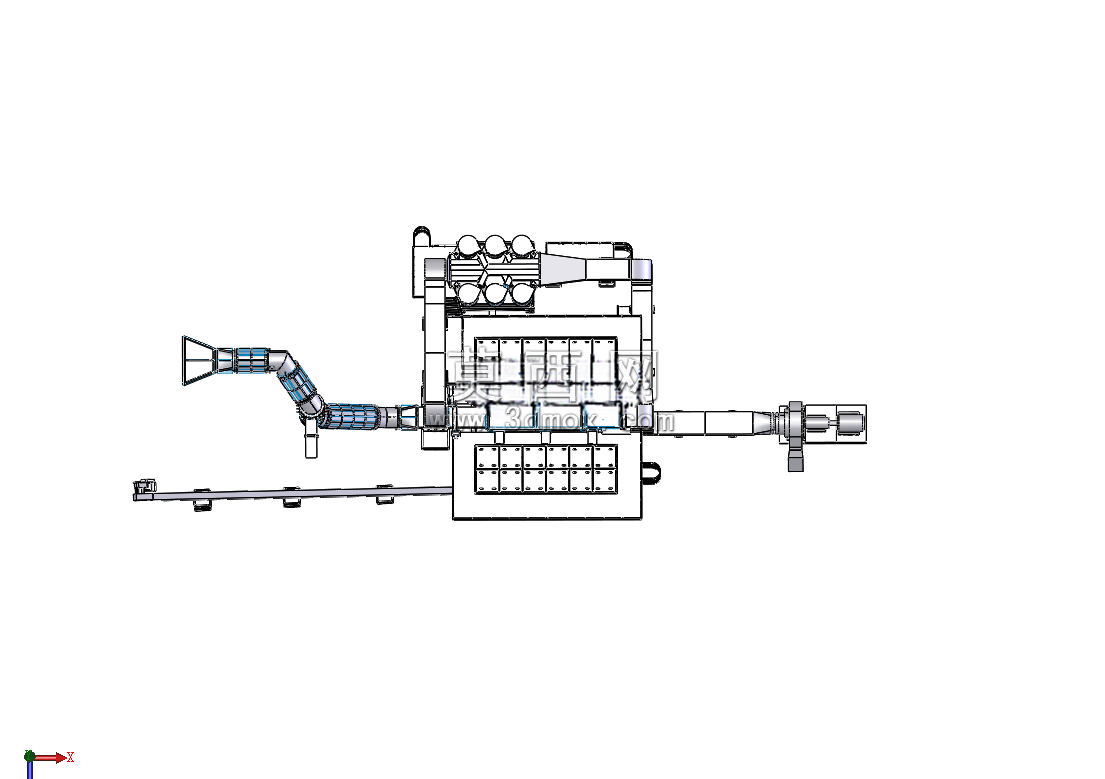
塑料桶提手自动安装堆叠生产线
说点什么吧
全部评论(
0
)
最新
最早
还没有评论,快来抢沙发吧!
下载地址
模型大小 :
20.58MB
消 耗 :
30莫西点
游览次数 :
0
包含文件 :
下载图纸请点击会员中心
如需帮助请联系QQ1102194243
成为钻石会员,图纸永久无限制下载
会员中心
相关的模型
该设计师其它作品
网站地图
|
RSS订阅
|
豫ICP备13014461号-1
联系QQ:1102194243