费斯托组件为基础的机器人。它可以与虚拟仪器程序如果你有倪SoftMotion和SolidWorks溢价。 这是
浏览517次 大小14.56 MB
简单的计算机辅助设计的机器人棕榈用手指有适当 movement(DOF)
浏览451次 大小7.89 MB
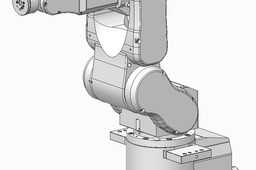
爱普生 C3,6 轴机器人
浏览698次 大小12.98 MB
I made this robot using IRONCAD 2011. Ask me for commercial usage.
浏览717次 大小67.81 MB
hm . i told my self i need to try my own robotic hand . and concept must be a bit differen
浏览745次 大小19.91 MB
第一届机器人大赛 (FRC) 的 2011年机器人。包括复杂钣金件设计、 管和管道的运行、 气动运行 /
浏览570次 大小3.45 MB
Lynxmotion 机器人手臂 SSC 32 机器人手臂与"风格夹持器"
浏览679次 大小52.52 MB
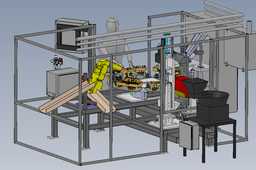
机器人焊接单元格
浏览681次 大小5.47 MB
项目工作的3D模型设计
浏览483次 大小4.34 MB
KUKA Industrie-Robot - Tool Change Sequenz for Milling Machine - 1500 Keyframes
浏览729次 大小2.88 MB
彪马560机器人手臂。
浏览586次 大小10.53 MB
?rnek ?al??ma
浏览504次 大小5.99 MB
金属手与现实伴侣和运动。 添加的视频的运动。
浏览570次 大小4.46 MB
救援机器人
浏览507次 大小5.77 MB
通过 catia v5 设计
浏览445次 大小3.28 MB
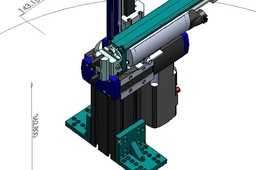
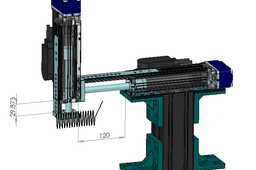
费斯托根据 XY 机器人。这是一个使用 SW 和 LabVIEW NI SoftMotion 功能块的起始示例。包括 3 练
浏览660次 大小12.94 MB
库卡机器人 KR125-3_AV400
浏览709次 大小2.47 MB
希望可以提出设计成真
浏览585次 大小1.65 MB
特别设计的气动效应器自治不均匀产生的收获。
浏览516次 大小19.57 MB
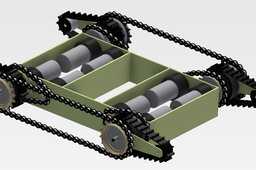
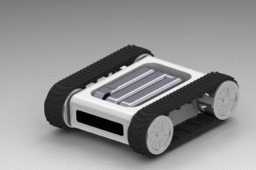
这是 (一般用途机器人) 探地雷达。他被为了开展常设人权可以做相对论低成本的大部分任务。探地雷
浏览461次 大小19.07 MB
我建这个3D模型真正与 NXT 2.0 集和其他部分从乐高卡车。我需要来衡量一些几何参数进行编程及其
浏览703次 大小14.93 MB
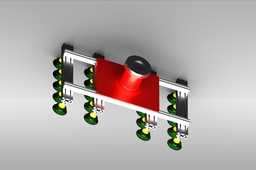
机器人真空夹具
浏览516次 大小7.38 MB
型号: -KR5 R350 Z200 平面关节型装配机器人 -KR30-60Jet -KR30L16 -KR120-R3500 -KR1000PA
浏览543次 大小37.85 MB
IRB140 3D模型在 SAT 格式中可用
浏览683次 大小7.82 MB
我看到一些概念草图从互联网,和我无法抗拒,3D模型的 3D...因此,这里是它......=)
浏览536次 大小19.38 MB
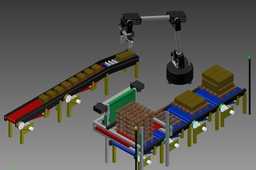
三角洲机器人已在 (x,Y 和 Z) 有 3 自由度并联机构,它用于挑选和包系统和数控等许多应用程序
浏览603次 大小83.7 MB
只是简单的 Fanuc
浏览622次 大小2.3 MB
约。规模相当于机器人腿,沿着Maschinen克里格ZbV 3000行
浏览526次 大小1.02 MB
豫ICP备13014461号-1 联系QQ:1102194243