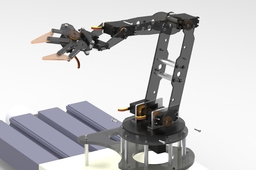
especifica??es 做 controlador: microcontrolador: ARDUINO DIECIMILA / ATmega168 Tens?o de
浏览1058次 大小71.47 MB
特别设计和建模救援和指战员机器人 (ITI 2011 国际创新竞争的阿斯兰哈尼 bronz medalia)
浏览874次 大小145.82 MB

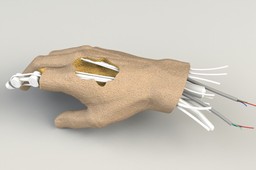
hm . i told my self i need to try my own robotic hand . and concept must be a bit differen
浏览745次 大小19.91 MB

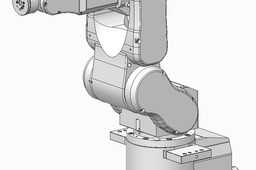
KUKA Industrie-Robot - Tool Change Sequenz for Milling Machine - 1500 Keyframes
浏览729次 大小2.88 MB