ДјНЧЖШДЋИаЦї AS5600 ЕФ 2DoF ЛњЦїШЫЪжЭѓ


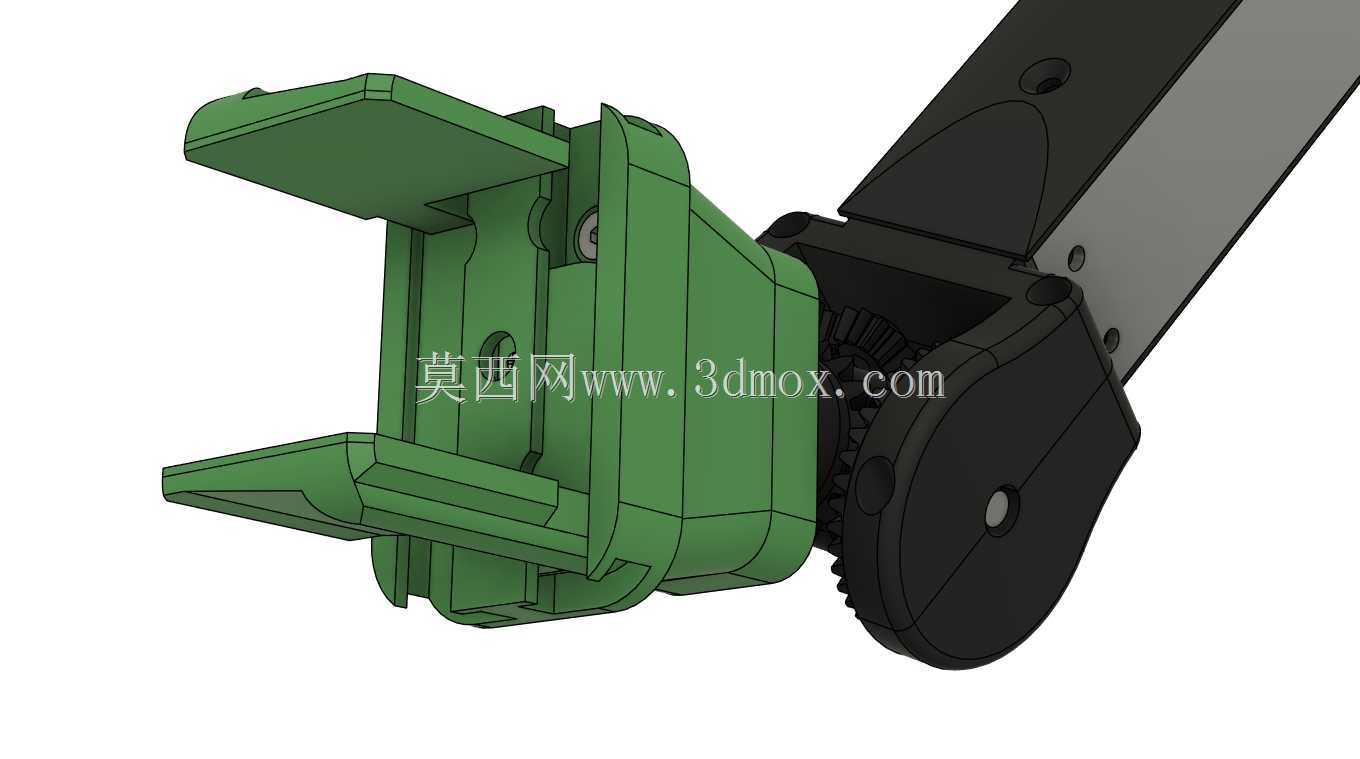
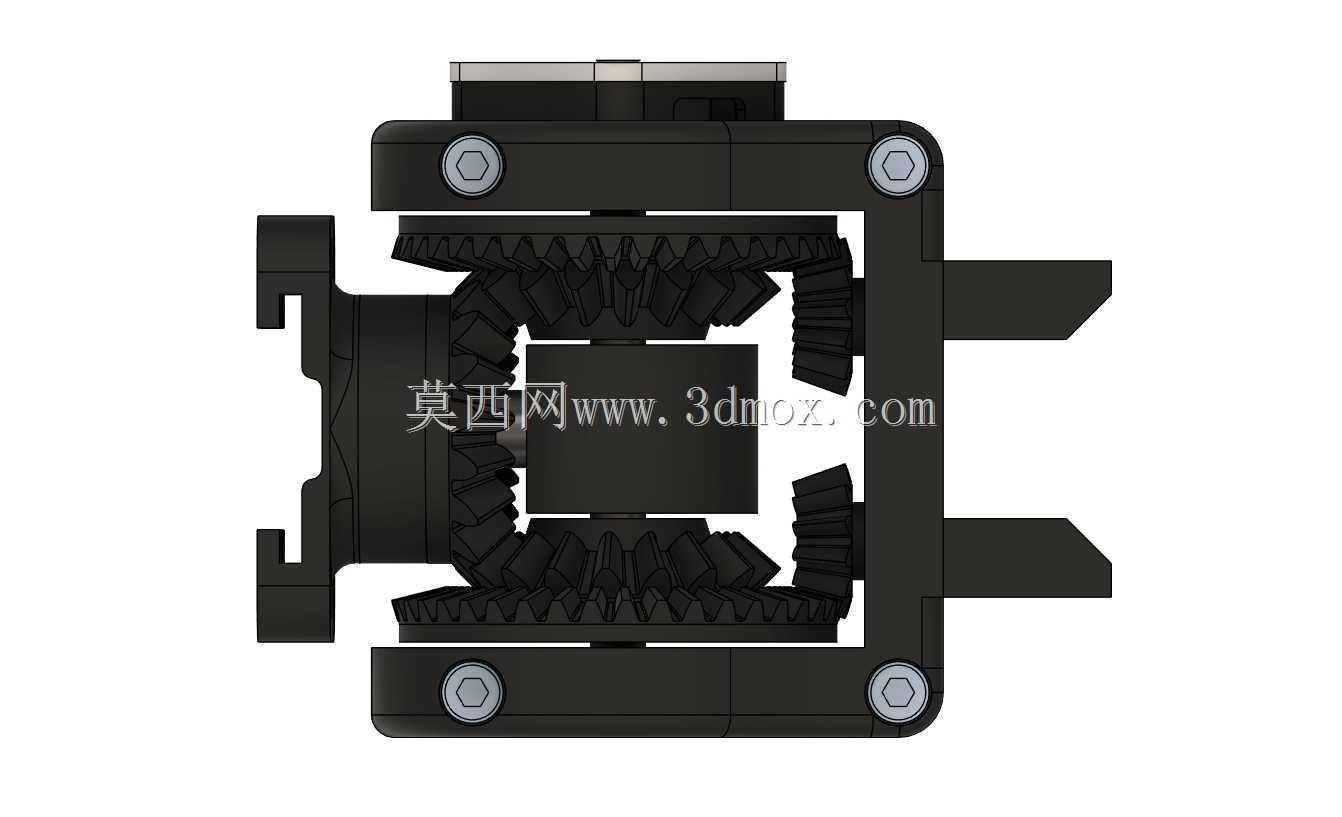
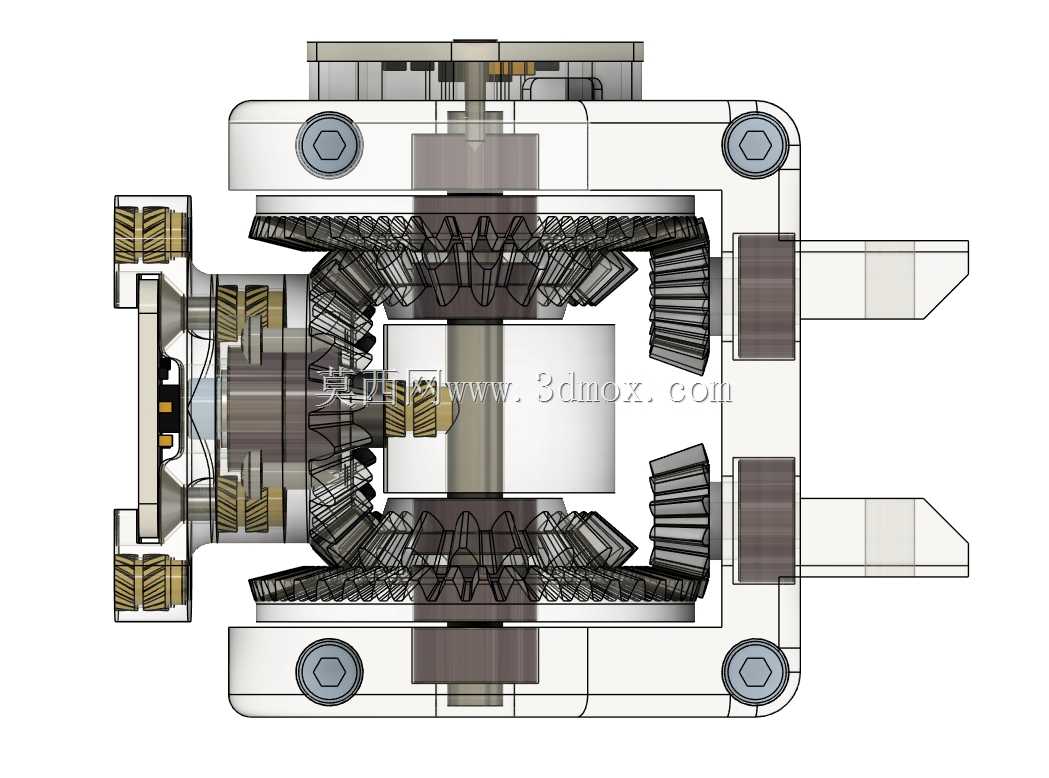






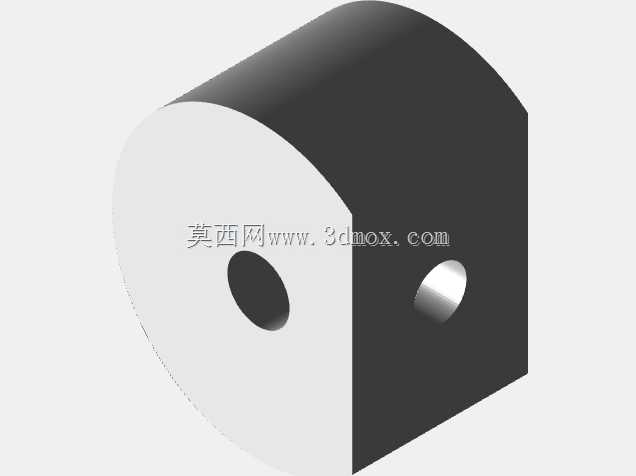

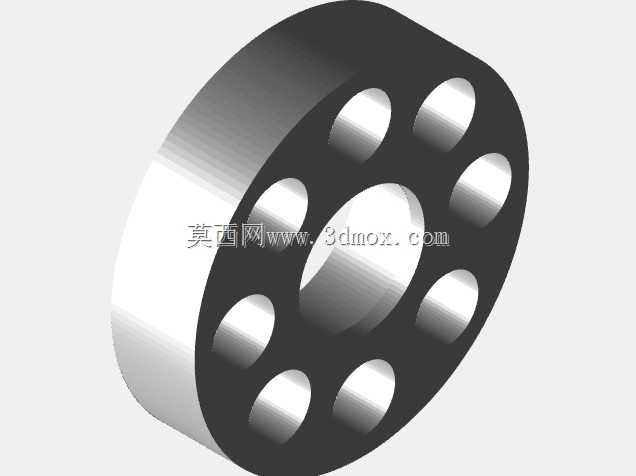
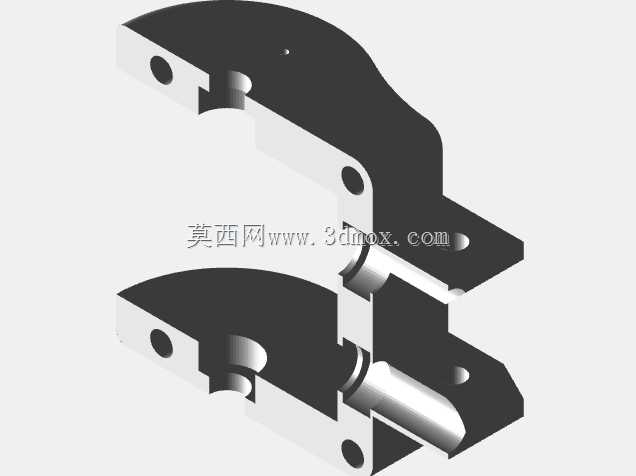

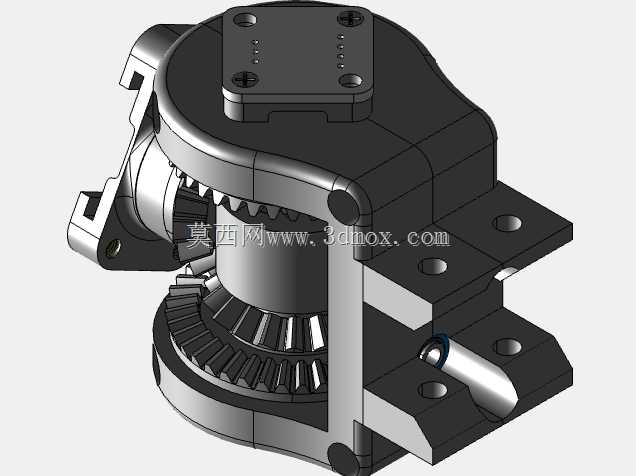
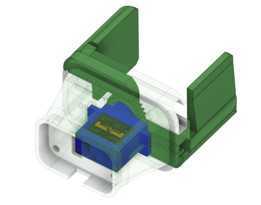
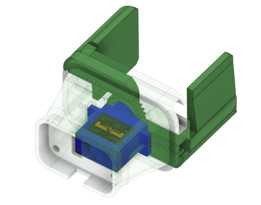
ЮвЮЊЮвЕФЛњаЕБлДДНЈСЫвЛИі2DoFЪжЭѓЁЃЕБЧАЮЛжУПЩвдЭЈЙ§AS5600ДХБрТыЦїВтСПЁЃГ§ДђгЁВПМўЭтЃЌЮяСЯЧхЕЅШчЯТЃК- 8Иі685-2zЙіжщжсГа- 1ИіН№ЪєжсЃЈжБОЖ5mmЃЌГЄЖШ53 mmЃЉ- 2ИіAS5600ДХНЧЖШБрТыЦї- 2Иі2x10гЂДчаЁТнЖЄ- 4ИіDIN 912 M3x16ТнЖЄ- 1ИіDIN 912 M3x20ТнЖЄ- 2ИіDIN 10642 M3x8ТнЖЄ- 11ИіM3x5mmВхМўЁЃДђгЁЛњЩшжУЃК- ВФСЯЃКPLA - ЬюГфЃК50 - ВуИпЃК0.1 mm - ХчзьЃК0.4 mmЁЃЮвЛЙЬсЙЉСЫВНжшЮФМўЃЌвдВщПДЪжЭѓЕФзщзАЗНЪНЁЃЫќгыЮвЗЂВМЕФЮЂаЭЫХЗўМаГжЦїЯрЦЅХфЃЌИУМаГжЦїдкЭМЦЌжавВПЩМћЃКЮЂаЭЫХЗўВЂСЊМаГжЦїЁЃаэПЩжЄЃКMIT
------ЗжИєЯп----------------------------
- ЩЯвЛЦЊЃКTrex 600 esp ЕчГижЇМм
- ЯТвЛЦЊЃКЖрЙЄОпЬзМў

ЫЕЕуЪВУДАЩ
- ШЋВПЦРТлЃЈ0ЃЉ

ЛЙУЛгаЦРТлЃЌПьРДЧРЩГЗЂАЩЃЁ
- ФЃаЭДѓаЁ ЃКЮДжЊ
- Яћ КФ ЃК5ФЊЮїЕу
- ЯТдиДЮЪ§ ЃК
- АќКЌЮФМў ЃКSTL,STEP / IGES,Rendering