FRC Team 1325 2019 比赛机器人







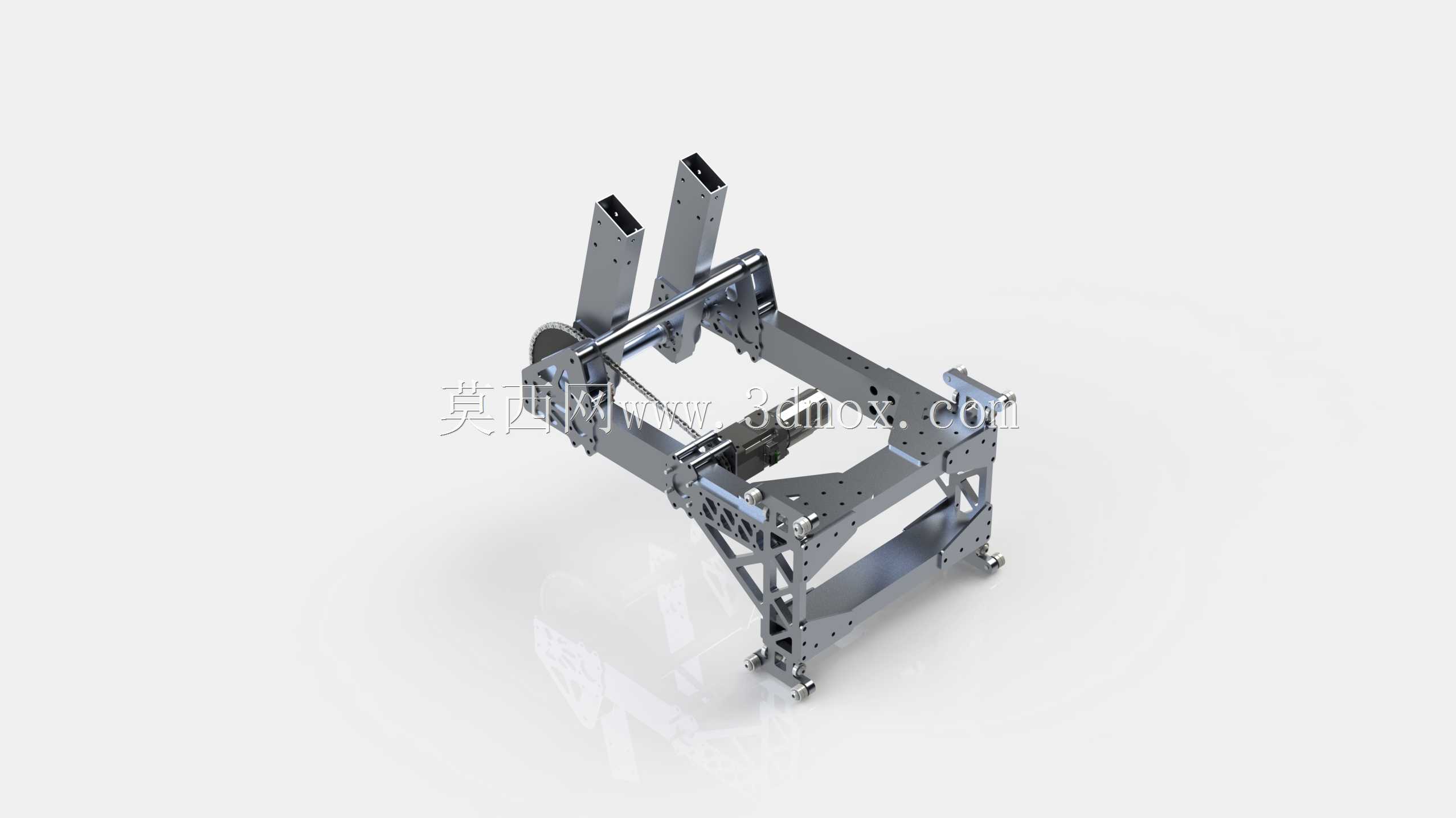



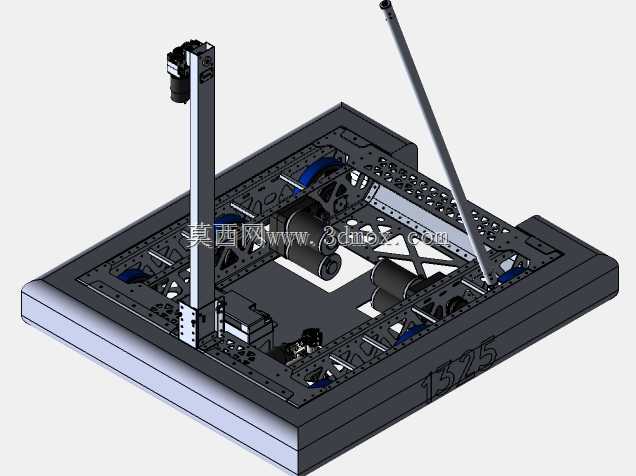


























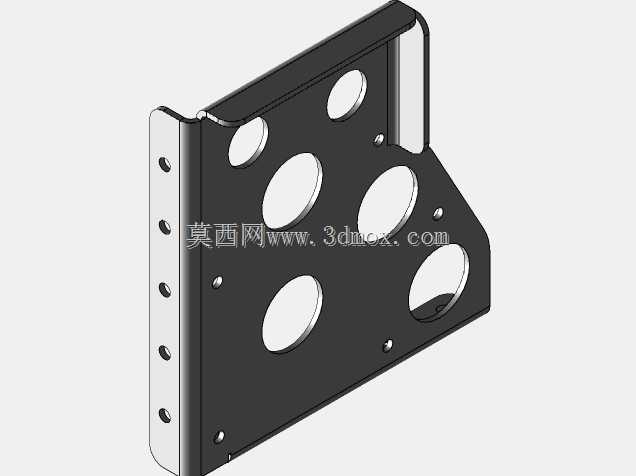




































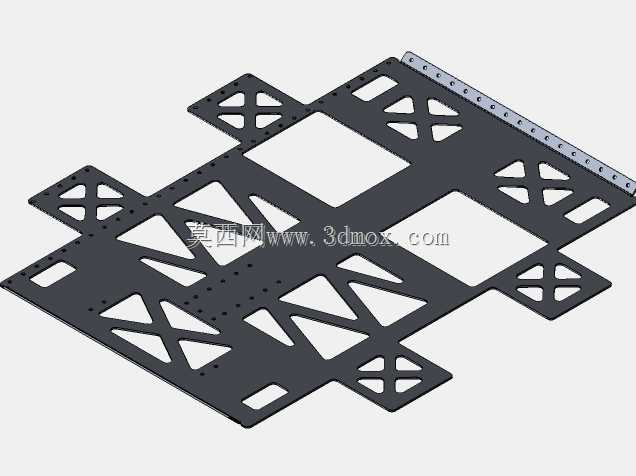






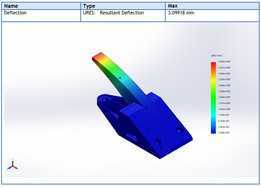
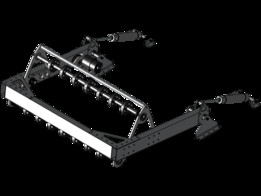
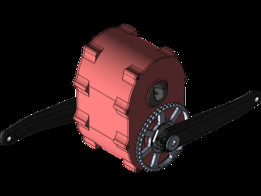
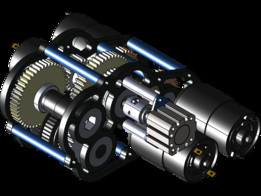
我亲自在 Solidworks 中设计了传动系统和升降装置组件。我是少数参与腕关节组件设计的作者之一。除了腕关节组件外,上传的组件均为我自己完成。传动系统:基于标准 1325 六轮坦克驱动系统,采用钣金结构,并进行了一些关键更改,这些更改将影响今年比赛的性能。其中最重要的是6英寸的轮子,它们提供了足够的离地间隙,使机器人能够在不损坏传动系统的情况下穿越场地。今年的传动系统采用双速变速箱,高速档以14英尺/秒的速度穿越场地,低速档(6英尺/秒)则用于防守,因为它提供了稳定性。电梯:电梯专为将比赛专用部件垂直提升7英尺而设计。今年的电梯设计以两级级联电梯架构为中心,并配有定制轴承座。该电梯总行程为64英尺,失速负载为165磅,满载行驶时间为0.91秒。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,Other