现代斯图尔特平台


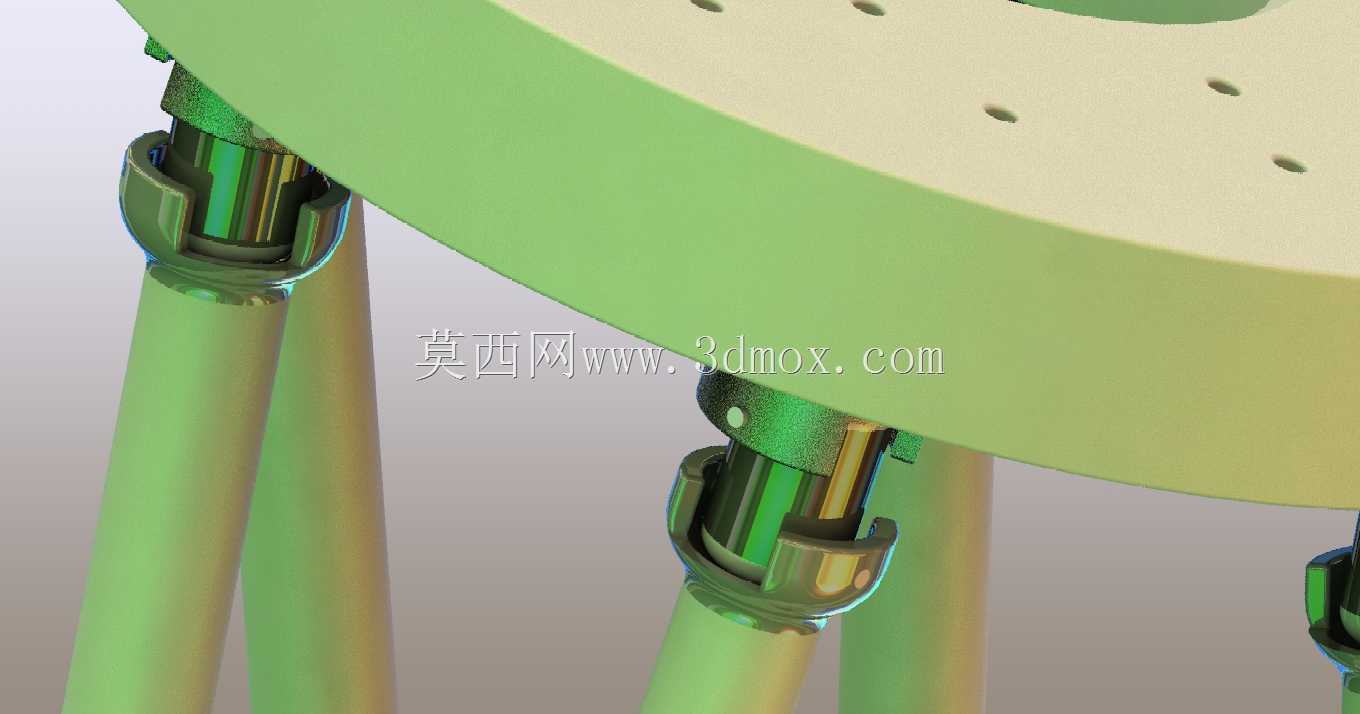
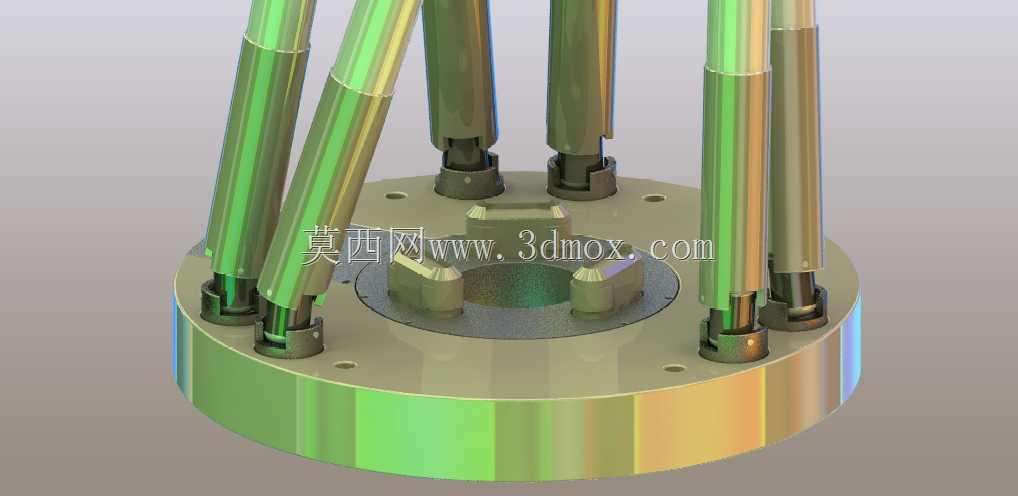








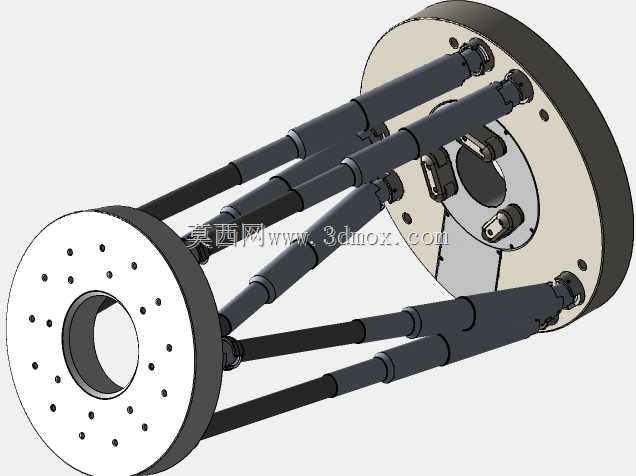
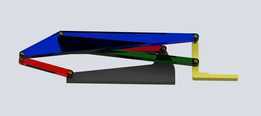
今天,我决定建立一个非常特殊的机制,称为Stewart平台。 当我第一次开始由西北大学发布的机器人运动基础的基础时,这种机制引起了我的注意。通过计算该系统的移动性或DOF,Grubler的公式告诉我们,Stewart平台具有6个自由度。 可以使用刚体的所有6度自由度移动顶部平台。 当然,运动范围有限制,但是这些限制并不能减少自由度的数量,这是独一无二的。感谢Solidworks的检查研讨会和Photoview360,以实现3D体验的现实可视化。 haytam3742@gmail.comenjoy。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,Snagit