机器人组件和太空任务的装备


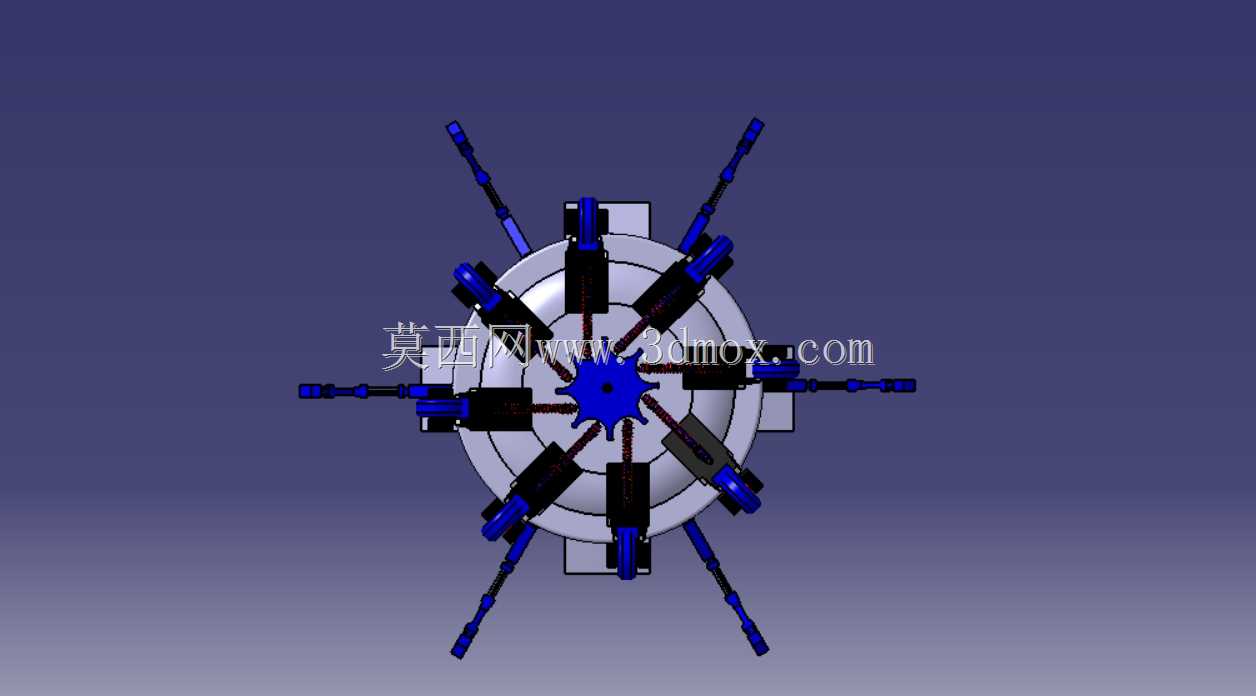


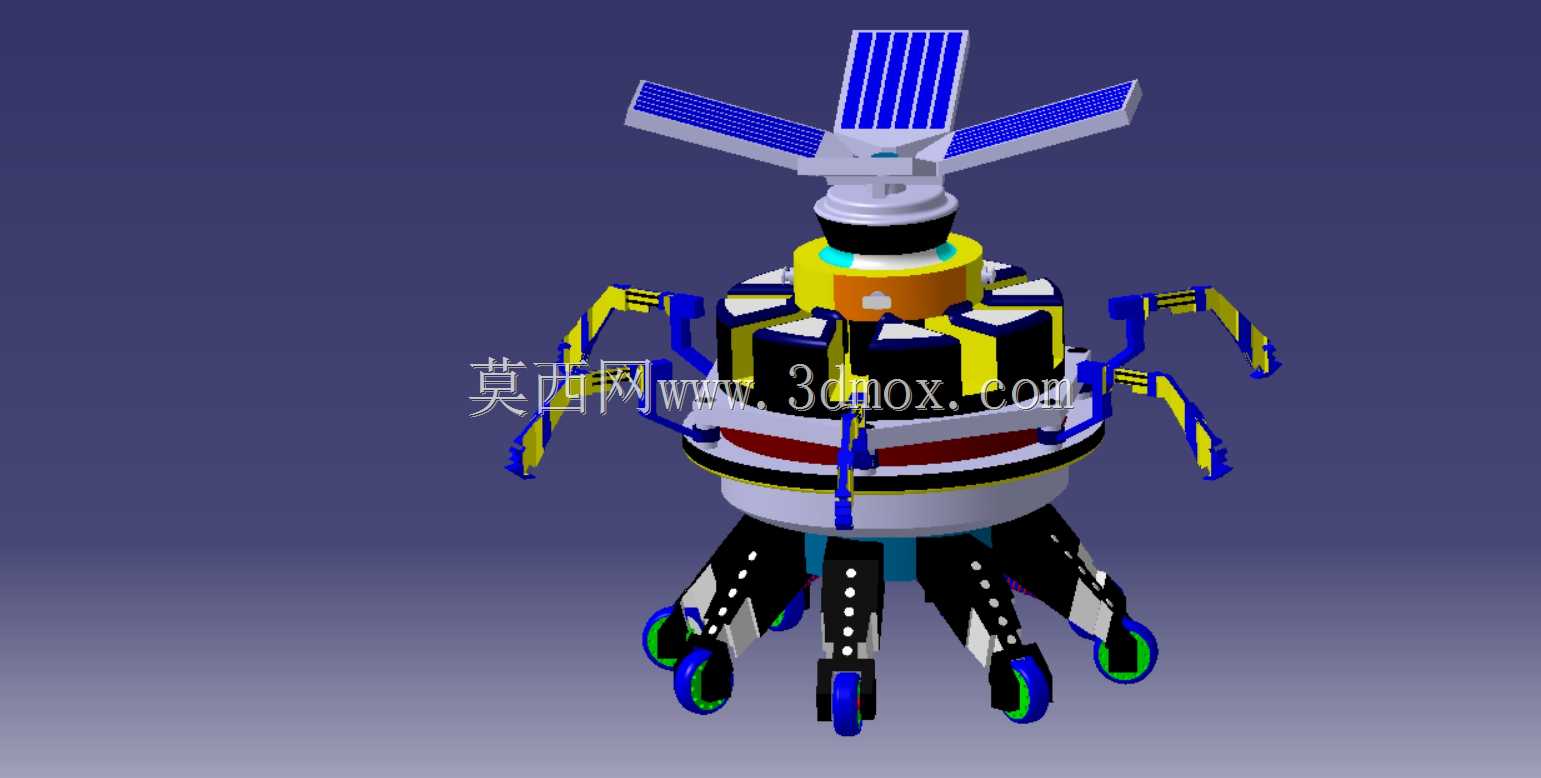
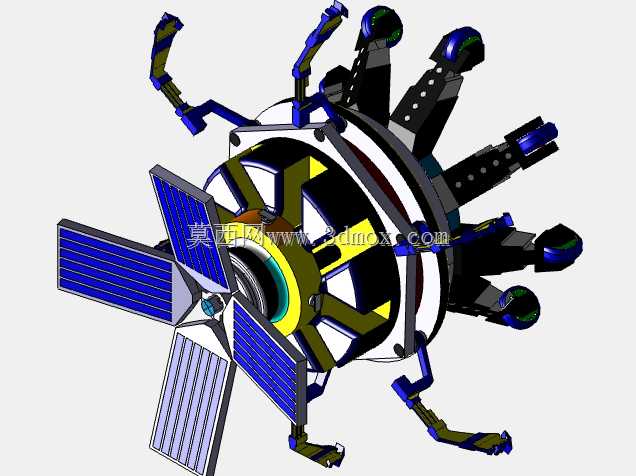
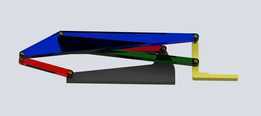
机器人是为空间任务设计的,可能是用于机器人组件或维护任务的。 它具有多个铰接式手臂,表明它可以处理各种工具或组件以及太阳能电池板,表明它由太阳能提供动力。 圆形底座可能意味着一定程度的活动性或稳定性,而多支腿或附件表明它可以在微重力或严峻的环境中运行。 该设计似乎优先考虑柔韧性和精确度,使其适合组装空间结构,修复卫星或在太空中建造栖息地。此外,该模型包括减震器弹簧,从而增强了稳定性并减少空间环境中操作过程中的振动。 这些功能允许机器人保持其精度,同时最大程度地减少由机械运动或外部力量引起的干扰,从而使其更适合于空间中的微妙任务,例如复杂的组装或停靠操作。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,Rendering