机械臂
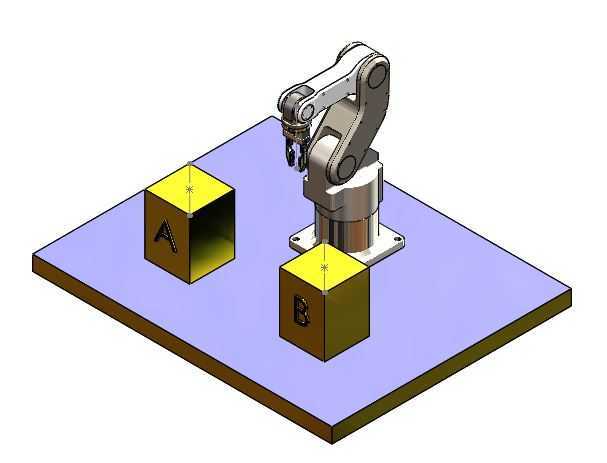
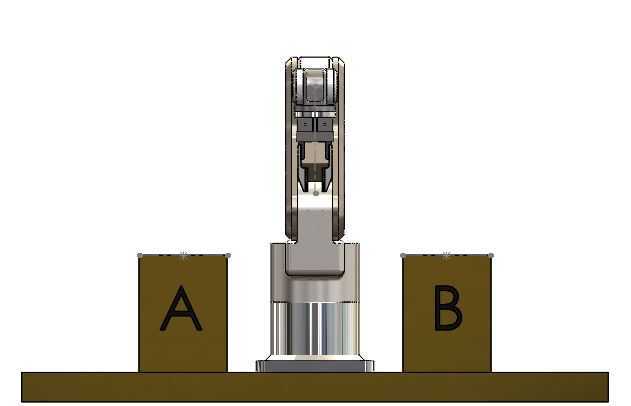
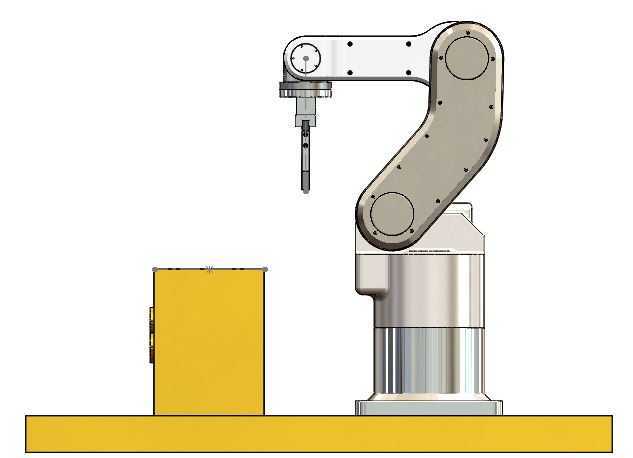
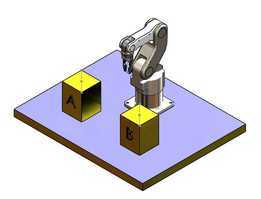
机械臂是一种模仿人类手臂运动和功能的机械装置。它被设计用于执行各种需要精确动作的任务,例如制造、装配、拾放操作、材料处理和外科手术。机械臂由多个部分组成,这些部分通过关节或连杆连接,使手臂能够向多个方向移动。手臂由计算机或微控制器控制,接收来自用户或预编程序列的命令和指令。大多数机械臂至少具有三个自由度,这使得它们可以在三个方向上移动:上下、左右和前后。更先进的机械臂可能具有多达六个自由度,这使它们能够在三维空间中移动并围绕不同的轴旋转。机械臂可以根据其预期用途配备各种末端执行器,例如夹持器、吸盘、焊接工具或摄像头。末端执行器安装在手臂末端,使机器人能够与物体互动或执行特定任务。总而言之,机械臂是一种多功能且适应性强的工具,可以高精度、高速度地执行各种任务,使其成为许多行业的宝贵资产。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering