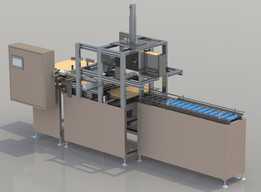
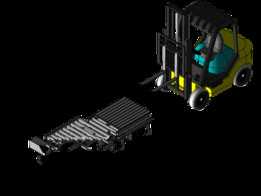
循线机器人 – 两点间自动货物运输(论文原型)设计方:Aegle Prototype Design
























线路跟随机器人 – 两点之间的自动货物运输(论文原型)设计者:Aegle Prototype Designhttps://youtube.com/shorts/jm2q6EBG1K4该线路跟随机器人是一种智能、自主的运输解决方案,作为论文原型开发,旨在简化定点物流中的物料处理。它旨在通过沿着预先铺设的轨道在两个地点之间运输货物,为仓库、学校、生产实验室和办公室提供可靠、低成本的自动化选择。主要特点:循线导航——使用红外传感器沿着定义的路径进行精确的点对点行驶。自主货物运输——能够在最低限度的监督下运输中小型物品。可编程路线逻辑——可以反转或重复行程,使其能够适应不同的用例。轻巧的amp;高效的设计——专为便携性和低功耗而设计。教育amp;实用——非常适合教授自动化原理或改进实际工作流程。应用:校园、小型仓库、生产装配线、实验室和工程研究。??有兴趣将其应用于您的工作流程或课堂吗?让我们一起构建。??直接联系我:aguilautoy@gmail.com


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Snagit,STEP / IGES,Rendering,SOLIDWORKS,Text file