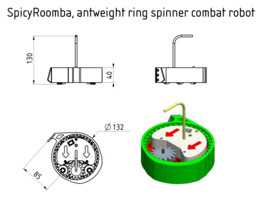
SpicyRoomba,美国蚂蚁重量级环形旋转战斗机器人(454克)
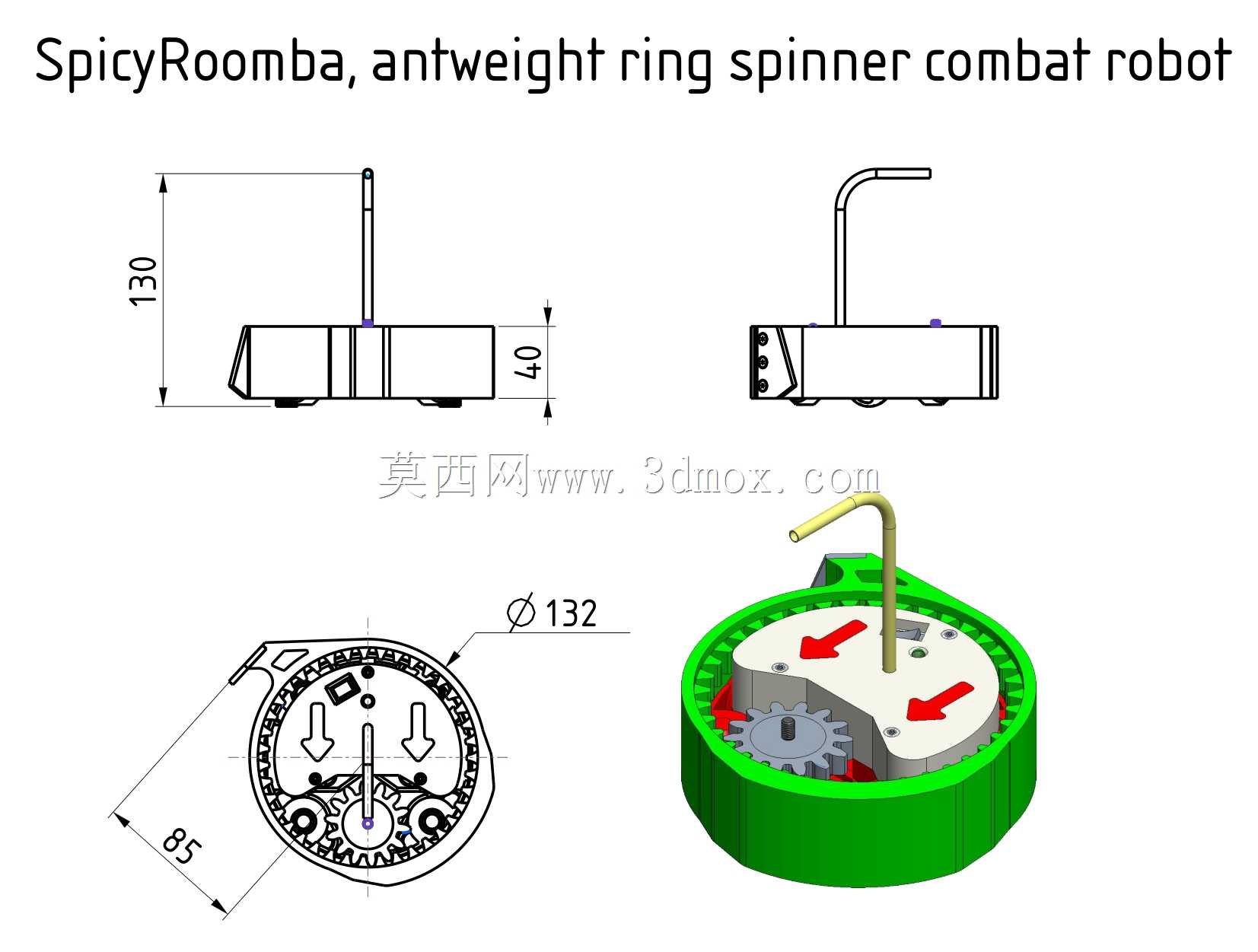
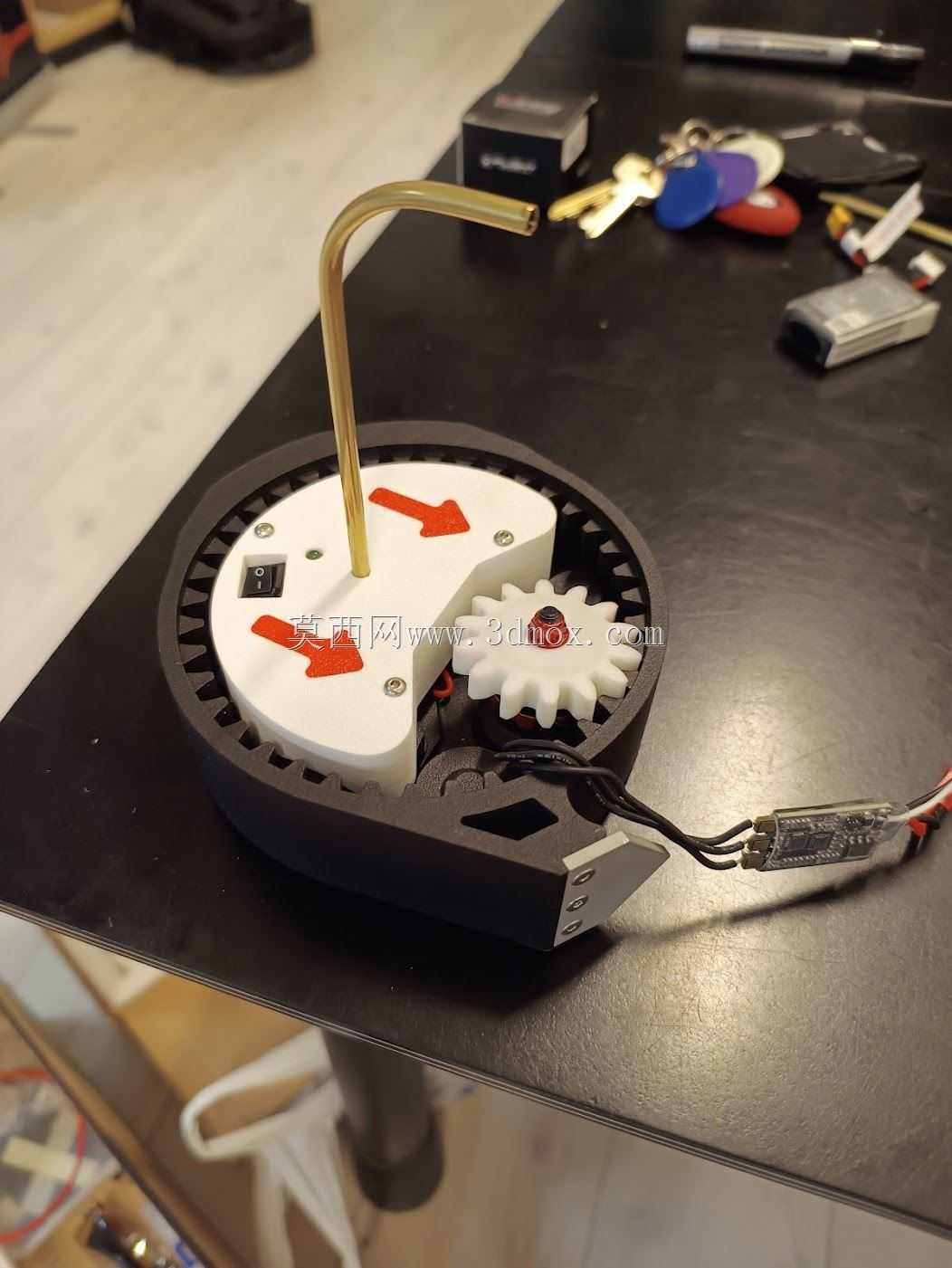

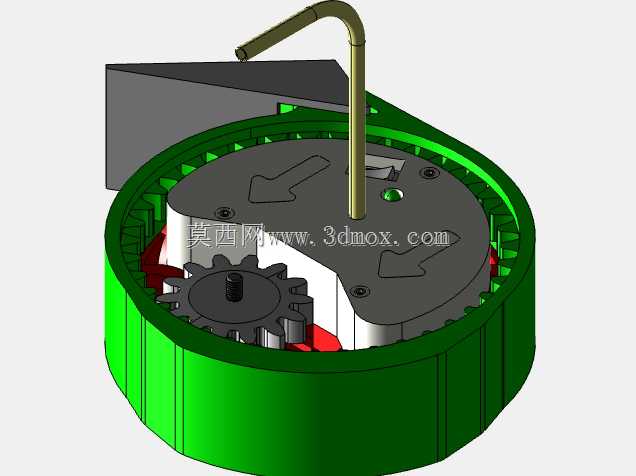
机器人行驶和旋转的视频位于文件部分。零件采用尼龙、树脂和塑料 3D 打印,刀具采用 7075 铝加工而成。防侧翻杆由 5mm 铝管制成。外环通过四个 U 型滚轮连接到主体N20 或 N30 驱动电机RS2205 Wepon 电机4 个底部支架上的鼠标滑翔垫。450mAh 3S 锂聚合物电池大多数是 8mm 沉头 M3 螺钉,顶盖上有一些 30mm 螺钉。需要改进的是:- 改进防侧翻杆,因为我因倒着落地而失败了。计划中的 V2 将移除防侧翻杆,并配备更大的轮子和更矮的高度,以便轮子可以在两个方向上驱动机器人。- 可以改进外壳与机身的连接。现在轴承摩擦力太大,外壳只是在滚轮上旋转。 - 可以选择较小的齿轮模块来改善振动 - 可以将壳体做得更薄以增加直径,我认为这将有助于解决 2.mp3 文件中显示的稳定性问题 - 应重新设计叶片 - 应将滚轮安装在壳体上而不是机身上以增加惯性
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,Snagit,STEP / IGES