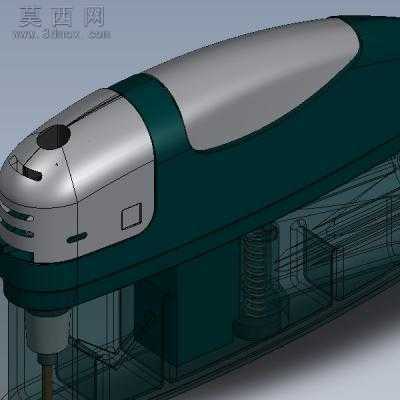
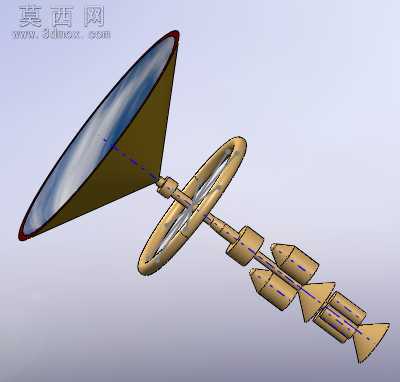
ABB-delta机器人 3D模型




ABB-delta机器人设计模型主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,包含参数,可以编辑,可以用SOLIDWORKS2010打开,绘制比较形象生动,非常逼真。欢迎下载学习,很不错的学习资料。
------分隔线----------------------------
- 上一篇:激光机用于激光打码 3D模型设计,
- 下一篇:德国汽车发动机 CAD图纸

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :15.19 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :SolidWorks