Twitchy 机器人

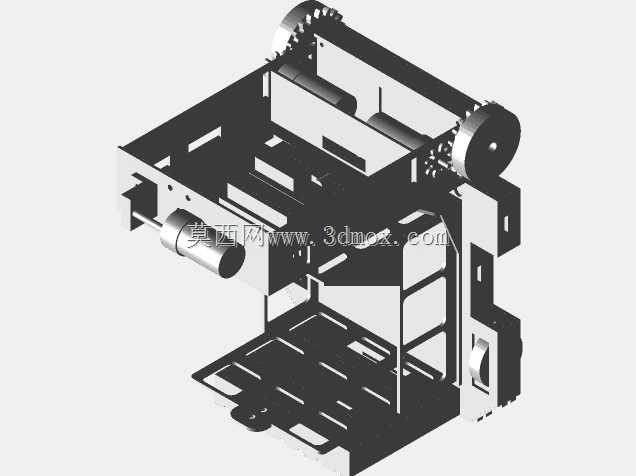
我和另外三名团队成员共同设计了一个完全自主的机器人。该设计力求尽可能简洁高效。挑战在于营救被帝国俘虏的“伊沃克人”和“丘巴卡”。该机器人可以(自主)完成的任务包括:- 通过放下桥梁跨越 6 英寸(约 15 厘米)的间隙;- 检测并响应红外信号;- 拾起小型“伊沃克人”并将其放入主篮筐;- 抬起主篮筐,将“伊沃克人”从栏杆上放下。该项目是 ENPH 253 课程的一部分。该机器人赢得了“最佳机器人原型”称号。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering