AGV机械臂






















































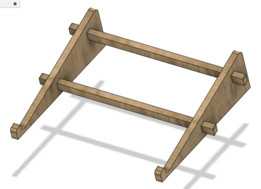
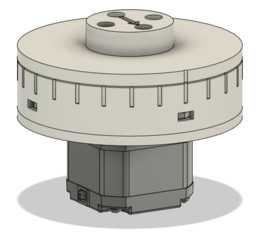
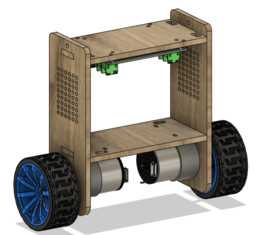
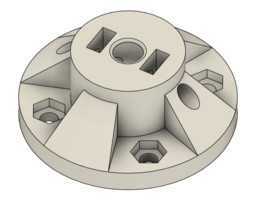
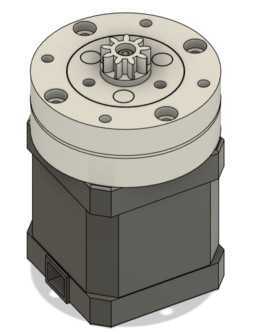
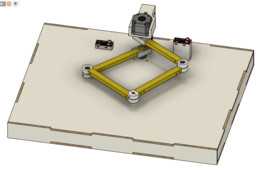
AGV机械臂是一种将AGV(自动导引车)与机械臂集成在一起的机器人,广泛应用于仓库、隔离区以及其他人类难以进入的环境。该机器人模型是我四年大学课程的最终项目――毕业论文――而设计的。该项目因其完善的硬件实现而受到老师们的高度赞赏。对于AGV机器人,我基于DDR(差速驱动机器人)配置进行设计,左右两侧对称放置两个主动轮。这种结构允许机器人绕其中心轴旋转,从而提供更大的方向改变灵活性。对于机械臂,我将其设计为三自由度(3-DOF)结构。这种配置具有多种优势,例如减少电机数量、简化控制,同时仍然满足在三维空间中的运动要求。本项目中的组件主要使用3D打印和激光切割技术制造。此外,我还集成了其他几个零件和材料,包括:- 20x20 铝挤压型材。- NEMA 23 混合式步进电机。- 5 通道线路跟踪传感器模块。- 超声波传感器模块。- 2004 LCD 显示模块。- 带 7S BMS 电路的 21700 电池组。- 带 herri 的 NEMA 23 步进电机
ngbone 变速箱。- 铝棒(?18×2 毫米,?6×1 毫米)。- 用于夹爪的 MG996R 伺服电机。- 625zz 和 608 轴承。- M8、M4 和 M5 螺栓及螺母。- ……请下载装配图以获取更详细的视图。感谢您的关注。点赞并关注,以便及时了解未来项目的最新进展。
------分隔线----------------------------
- 上一篇:滚子轴承
- 下一篇:采用摇臂转向架式悬挂机构的全地形移动机器人原型

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Snagit,STL,STEP / IGES,AutoCAD,Rendering