步行机器人腿
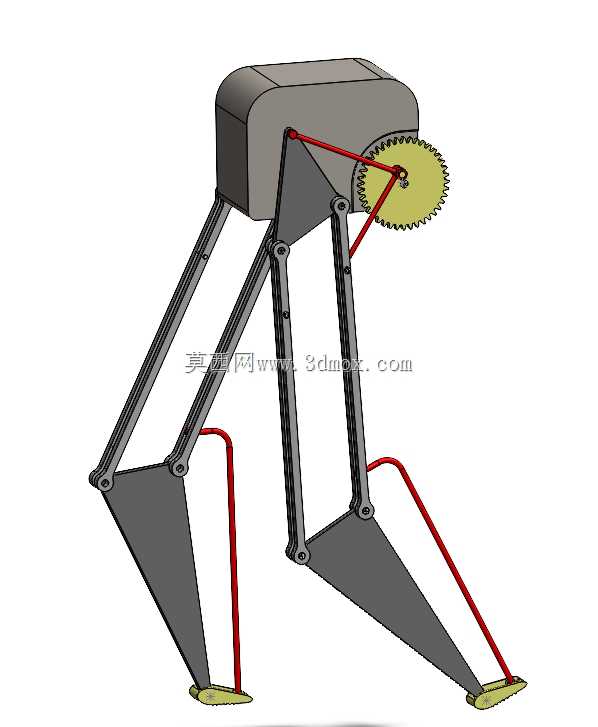
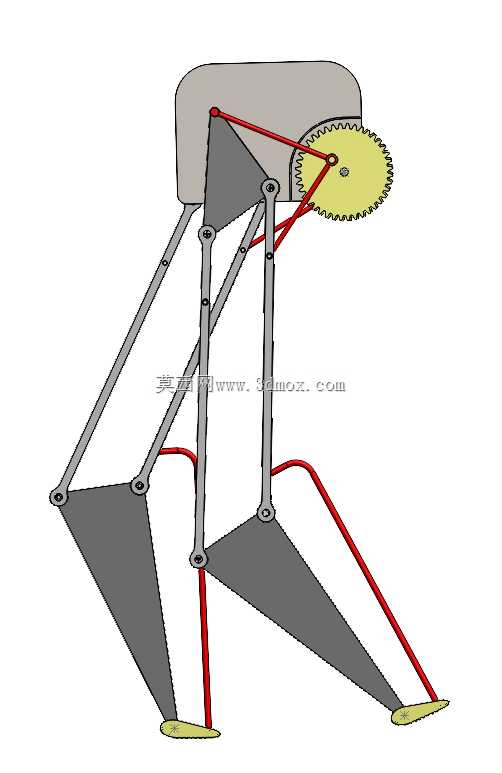

这是一个使用 Jansen 连杆机构制作的步行机器人腿部原型。Jansen 连杆机构是由运动雕塑家 Theo Jansen 设计的一种平面腿部机构,旨在实现流畅的步行运动。
------分隔线----------------------------
- 上一篇:塑料增密机――将废塑料转化为建筑级空心砌块(论文原型)
- 下一篇:直升机旋翼系统

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,Snagit