武术擂台比赛机器人SW设计 3D模型
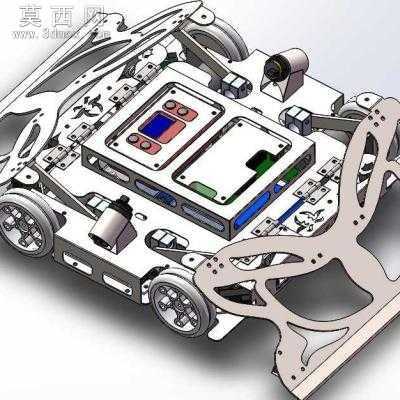
武术擂台赛机器人用两块msp430最小系统板来控制 用7805模块转换电压,最终输出的5v电压分为两路,分别用开关控制每个最小系统板的运行。用5个光电开关来寻物,另外4个光电开关来检测地面来防止掉下擂台。在机器人腰部安装一个扭矩为30Kg的舵机,实现比赛腰部旋转或俯仰的规则,每个手臂安装2个较小舵机,实现对对方的击打和攻击,体现武术机器人的特点。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :18.78 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :SolidWorks