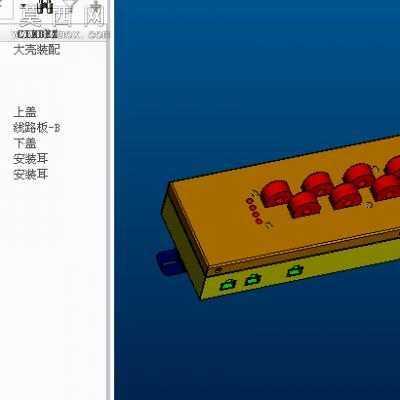
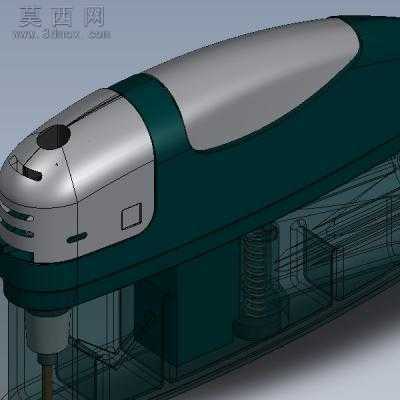
反转焊接夹具 3D模型
目的・动作
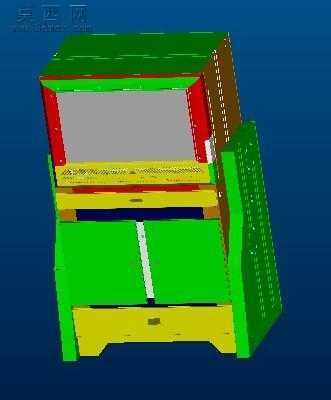
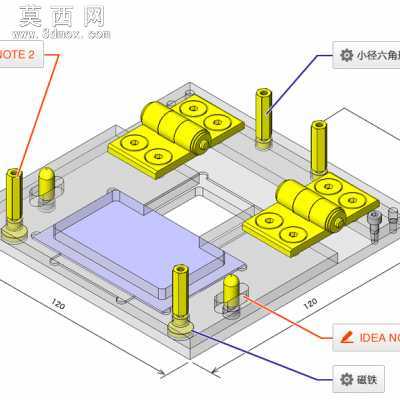
夹紧并固定工件(电路板)后进行颠倒的焊接夹具。
环境・操作性
作业步骤
固定工件,并通过磁铁固定盖板。
电路板表面的焊接作业。
手动反转夹具(抓住固定侧支柱并抬起,另一只手握住夹具侧面进行反转)。
电路板背面的焊接作业。
对象工件
电路板
外形:W70×D45×t1(也适合W40×D80×t1的电路板)
夹紧并固定工件(电路板)后进行颠倒的焊接夹具。
环境・操作性
作业步骤
固定工件,并通过磁铁固定盖板。
电路板表面的焊接作业。
手动反转夹具(抓住固定侧支柱并抬起,另一只手握住夹具侧面进行反转)。
电路板背面的焊接作业。
对象工件
电路板
外形:W70×D45×t1(也适合W40×D80×t1的电路板)
------分隔线----------------------------
- 上一篇:同步带主动传动 3D模型
- 下一篇:非磁性体圆柱形工件检测结构 3D模型

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :2.07 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :SolidWorks