3自由度斯图尔特平台――伺服电机并联机械手
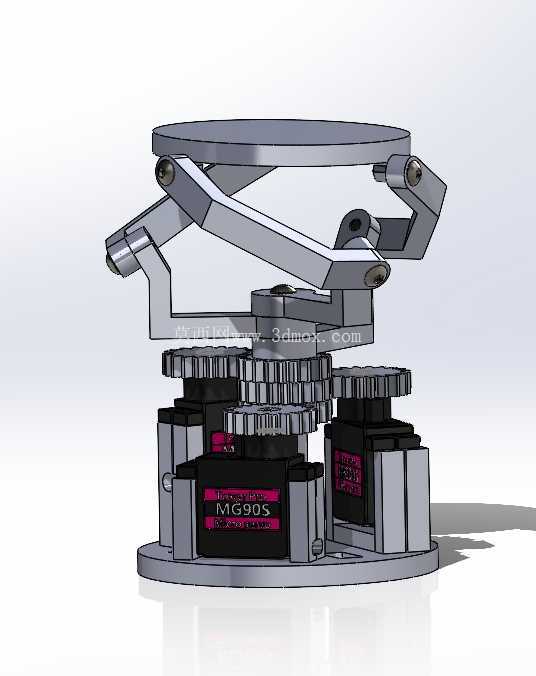
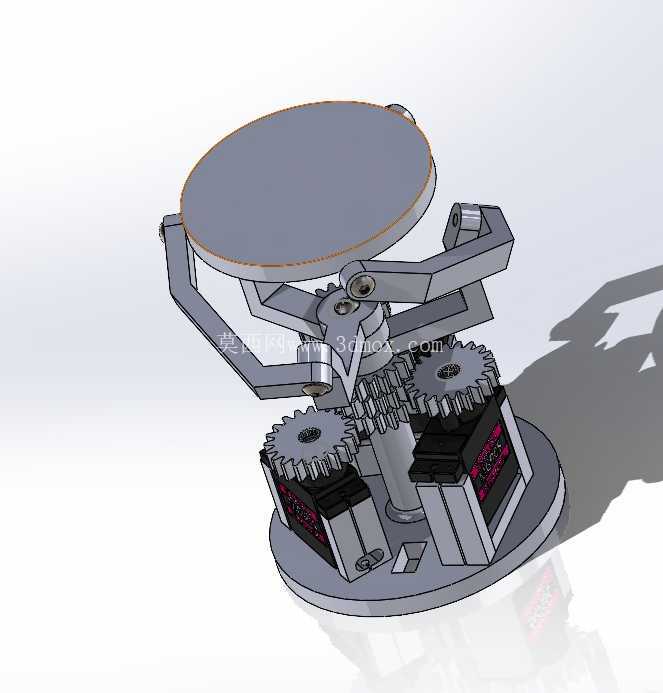
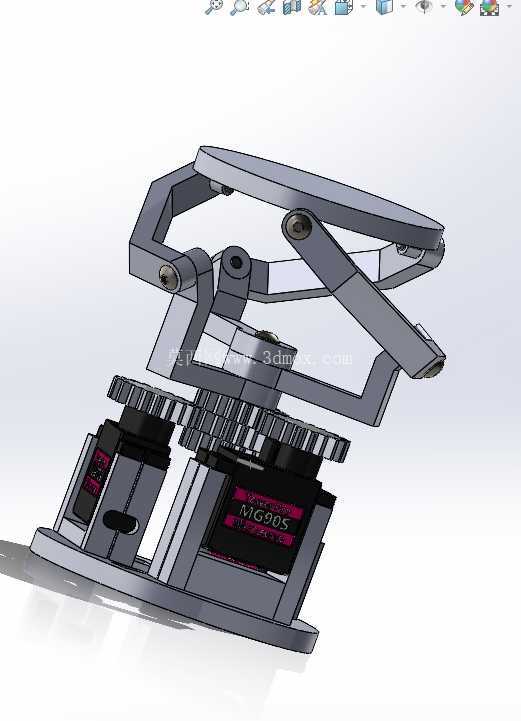

此模型为三自由度 (3-DOF) Stewart 平台设计。运动由 MG90S 微型伺服电机和齿轮机构实现。并联机械臂结构可实现精确稳定的运动。它适用于小型机器人应用、平衡系统和教育项目。该设计使用 SolidWorks 创建,并针对伺服电机运行进行了优化。用户可以探索该模型,将其集成到自己的项目中或对其进行改进。
------分隔线----------------------------
- 上一篇:DogBot 四足机器人
- 下一篇:适用于KUKA的3D打印夹具

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering