

Delta机器人3自由度








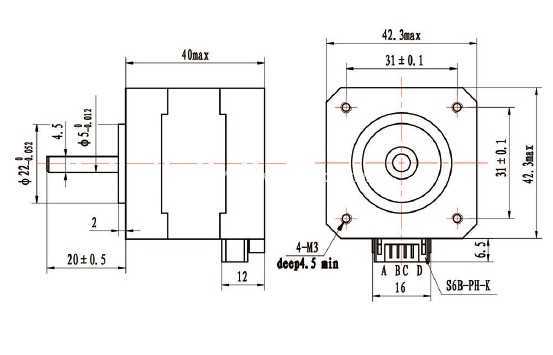



我向大家展示我制作的第一个三自由度三角并联机器人。虽然还有一些细节需要调整,但我对目前的结果很满意。注意:对于连杆1和2的连接,我使用了以下模型:https://grabcad.com/library/ball-joint-head-holder-push-tie-rod-end-turn-buckle-servo-linkage-nylon-connector-spare-part-for-rc-aircbue 我修改了杆的长度。___________________________________________我将继续完善这个模型,最近我会分享二维图纸,以便大家更好地了解尺寸。
------分隔线----------------------------
- 上一篇:HTD-3M 80T 11AF 皮带轮
- 下一篇:4自由度机械臂

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering




















