hebi_robot
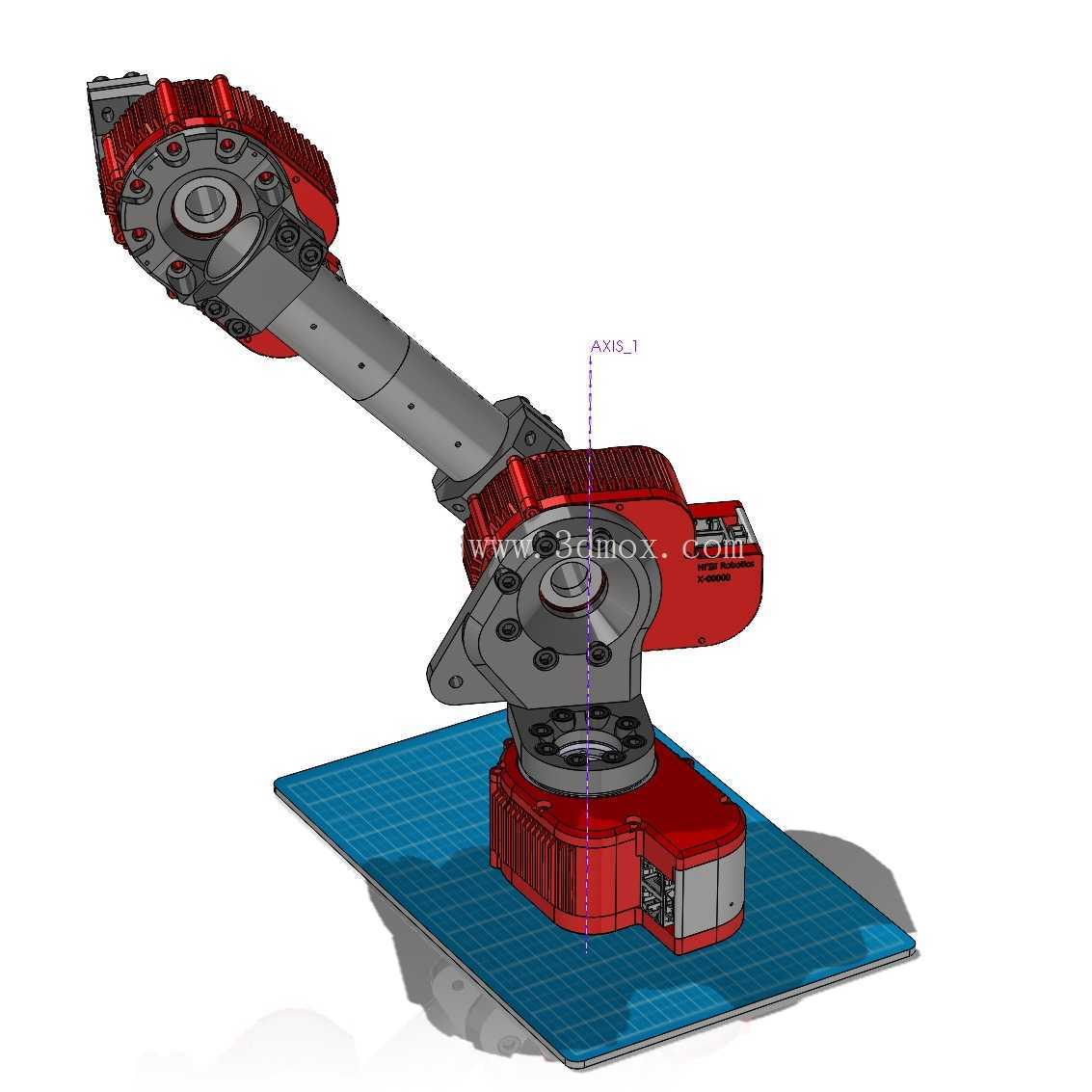
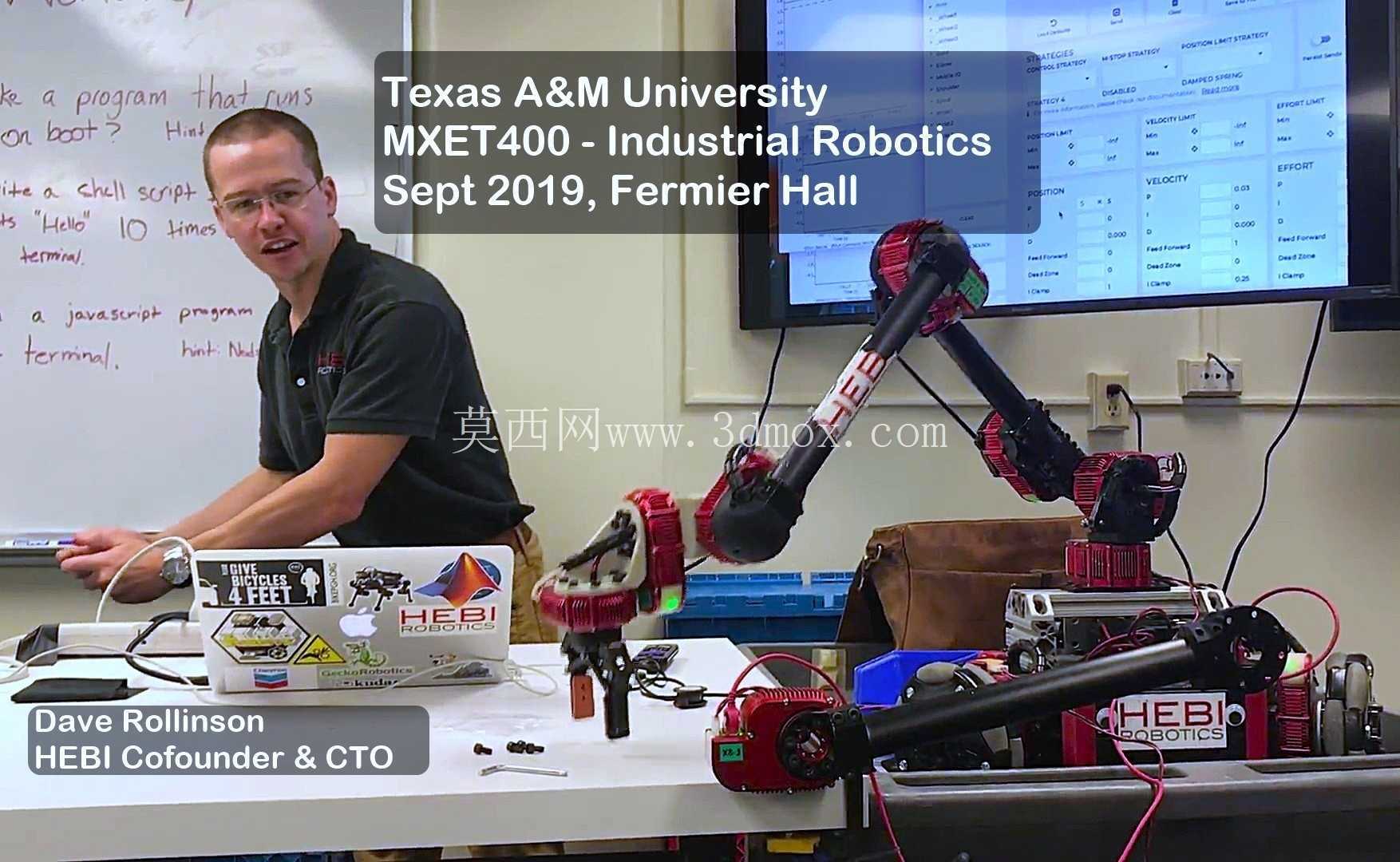
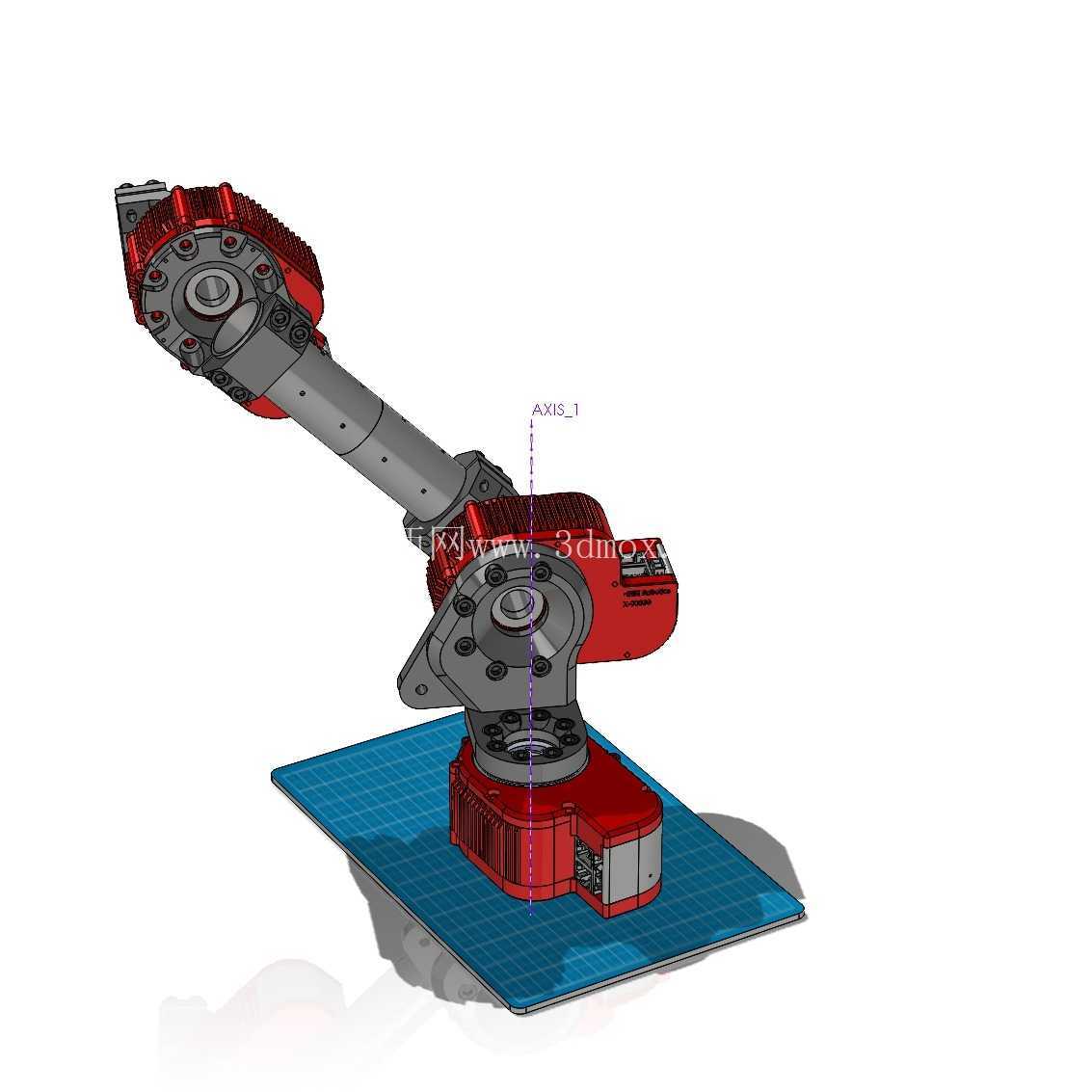
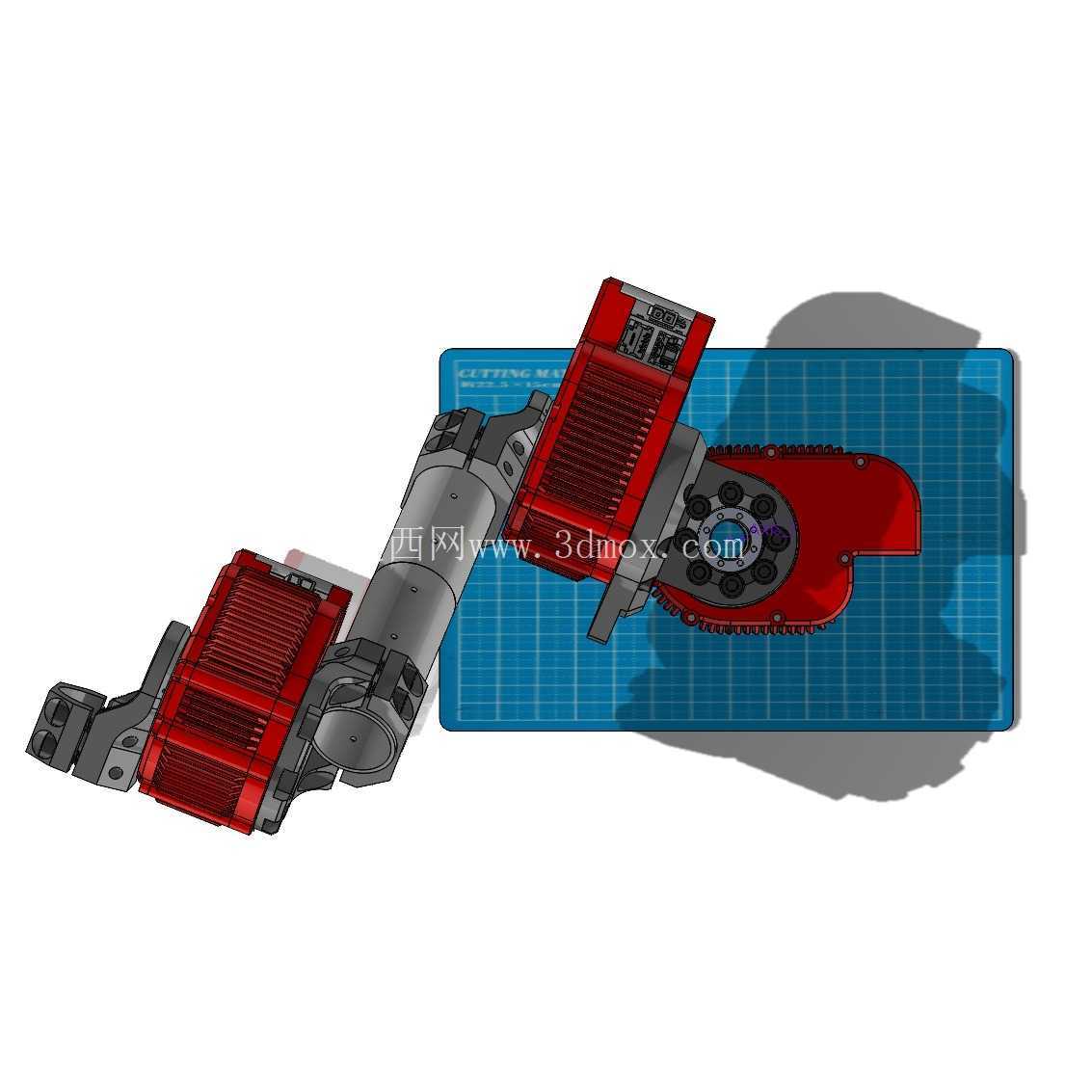

HEBI机器人X8模块组件,用于MATLAB运动规划和仿真。该组件包含3个由HEBI机器人公司提供的X8(高扭矩)执行器。简单的3自由度机械臂配置适用于教育机器人,最初于2018年左右在德克萨斯农工大学(Texas Aamp;M University)开发。要使用MATLAB进行运动仿真,必须使用XML文件(包含在DATA文件夹中)配置模型。对于SOLIDWORKS任务,实体模型已组装并限制了旋转。这些执行器可以无限旋转,但在实际应用中,必须限制旋转以防止穿过管道的电缆扭曲。希望您喜欢这个模型!如果您使用此组件,请留言并分享您的工作,以便我继续发布有用的设计! -DM


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering,Text file