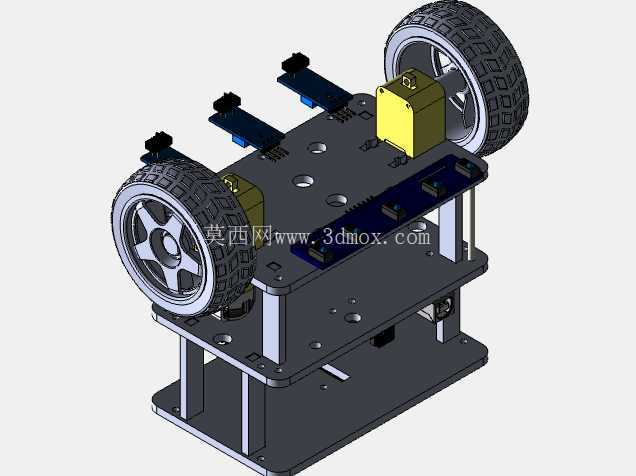
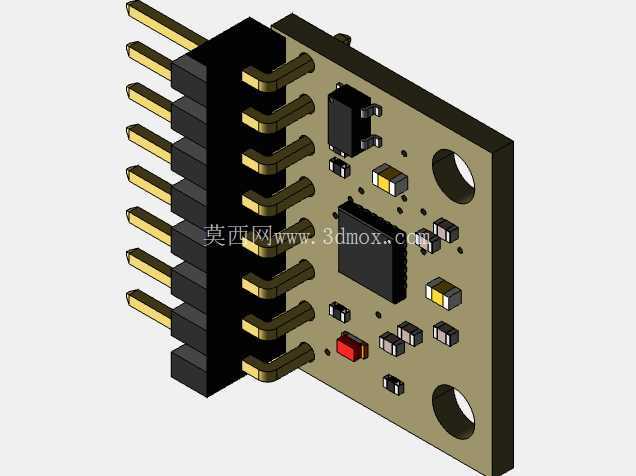
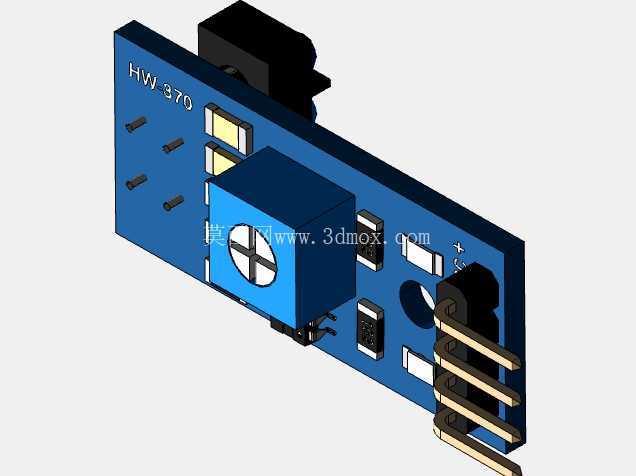
自平衡两轮机器人(MPU6050 PID 控制)
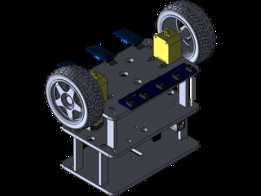
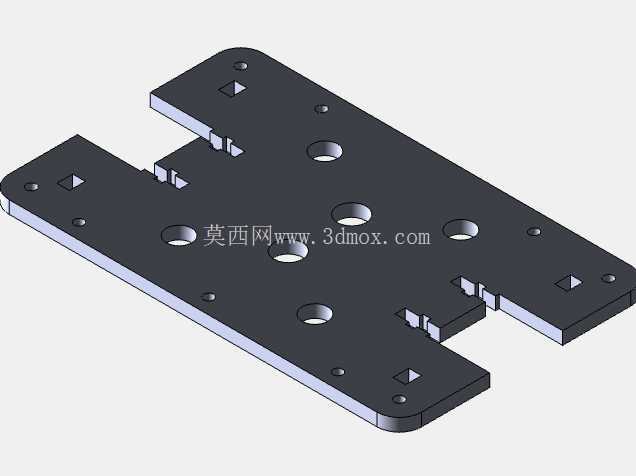
这是一个完整的CAD设计图,展示了一款用于机电一体化和嵌入式控制系统领域教学和实验的自平衡机器人。该机器人利用MPU6050惯性测量单元(IMU)传感器的反馈和PID控制算法,通过两个轮子保持平衡。系统由微控制器(Arduino)控制,机器人可以通过相应地调整电机转速来应对扰动。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES


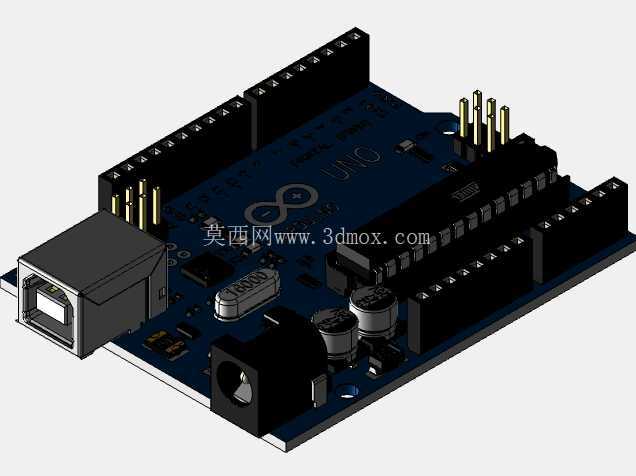
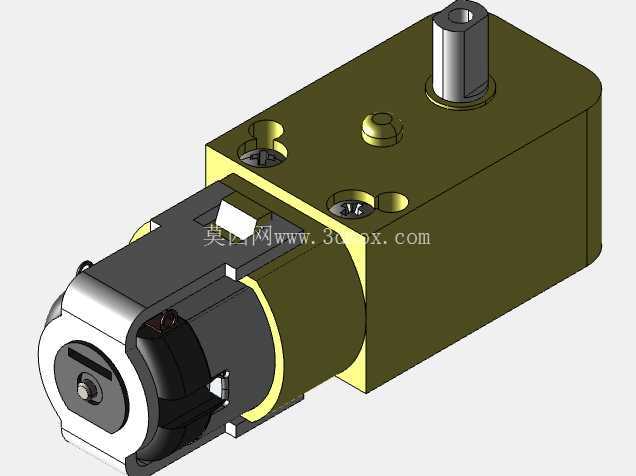

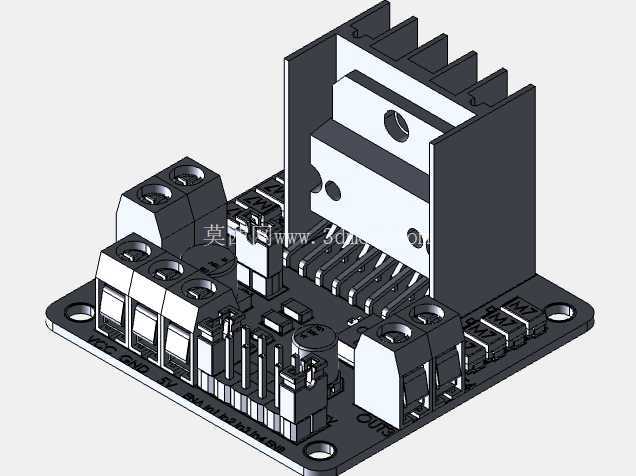
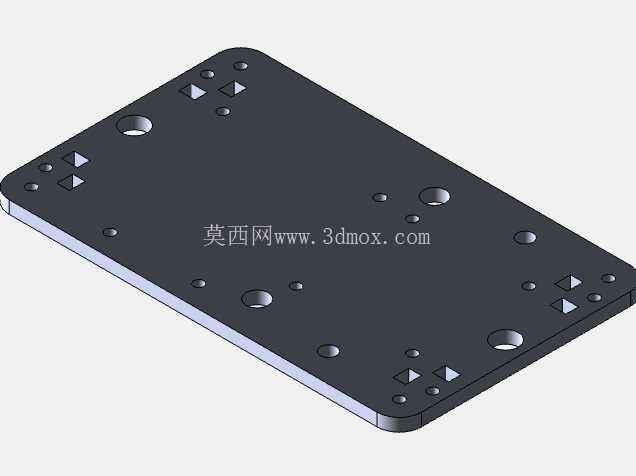

这是一个完整的CAD设计图,展示了一款用于机电一体化和嵌入式控制系统领域教学和实验的自平衡机器人。该机器人利用MPU6050惯性测量单元(IMU)传感器的反馈和PID控制算法,通过两个轮子保持平衡。系统由微控制器(Arduino)控制,机器人可以通过相应地调整电机转速来应对扰动。