球平衡台

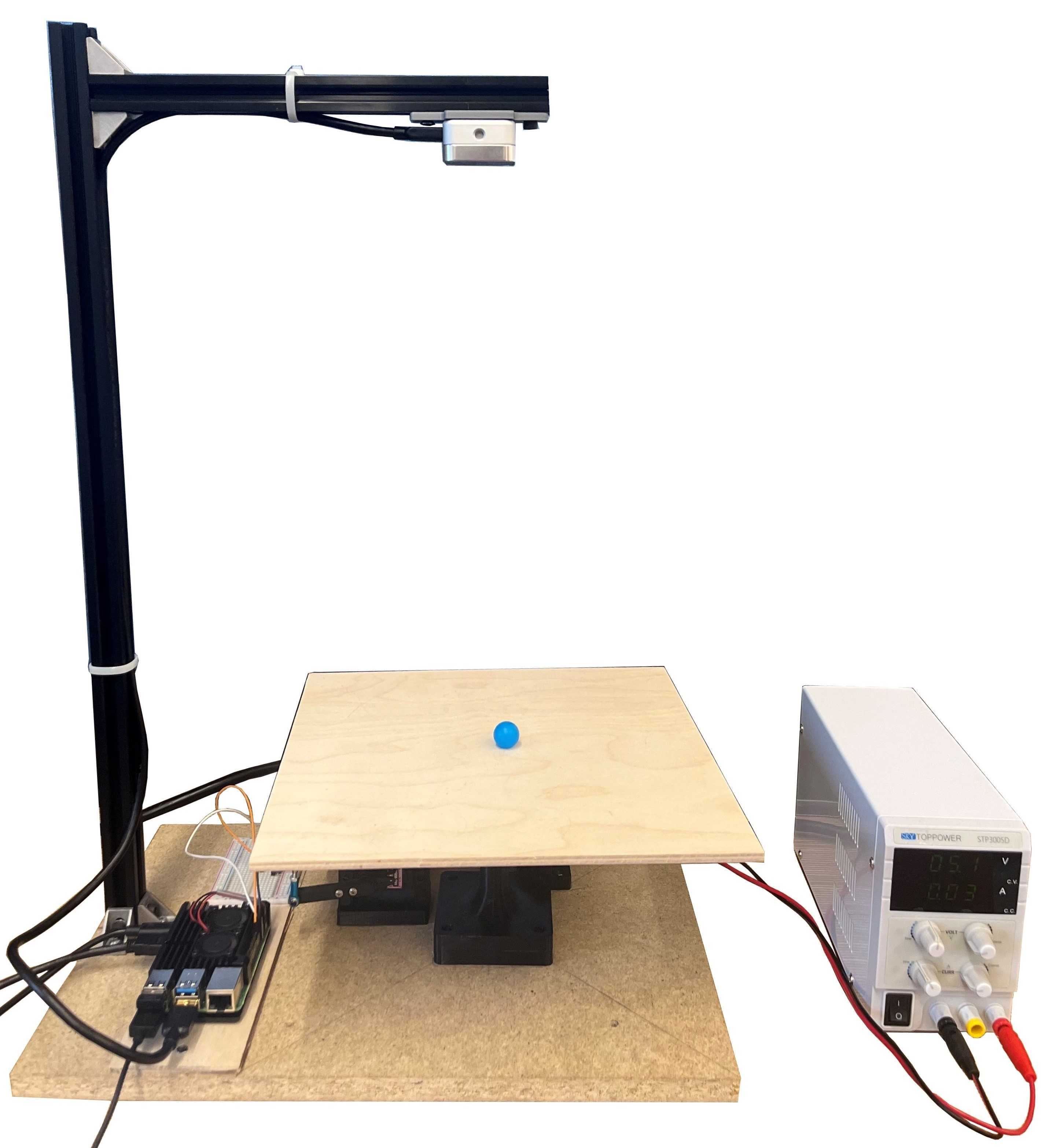













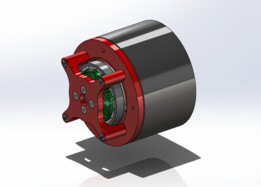
硬件:- 树莓派 4- 英特尔 RealSense D405(或任何 USB 网络摄像头)- CRAFTSMAN 万向节套筒(3/8 英寸驱动)- 2 个 MG996R 伺服电机- 2 个 60mm 伺服拉杆连杆控制回路:- 使用 USB 网络摄像头以 60 Hz 的频率捕获 RGB 图像- 使用 OpenCV 执行 HSV 掩码、腐蚀膨胀、轮廓查找和力矩计算以获取球的位置- 使用 PID 控制器计算每个伺服电机的期望位置
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering