

单臂机器人

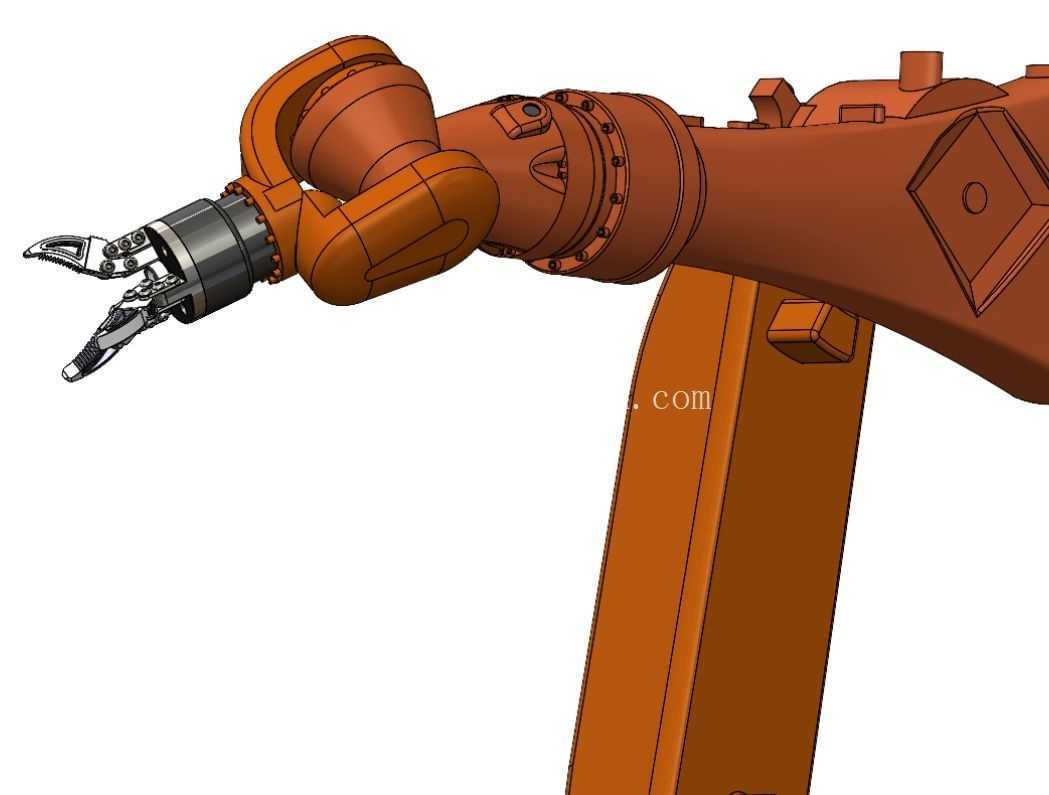
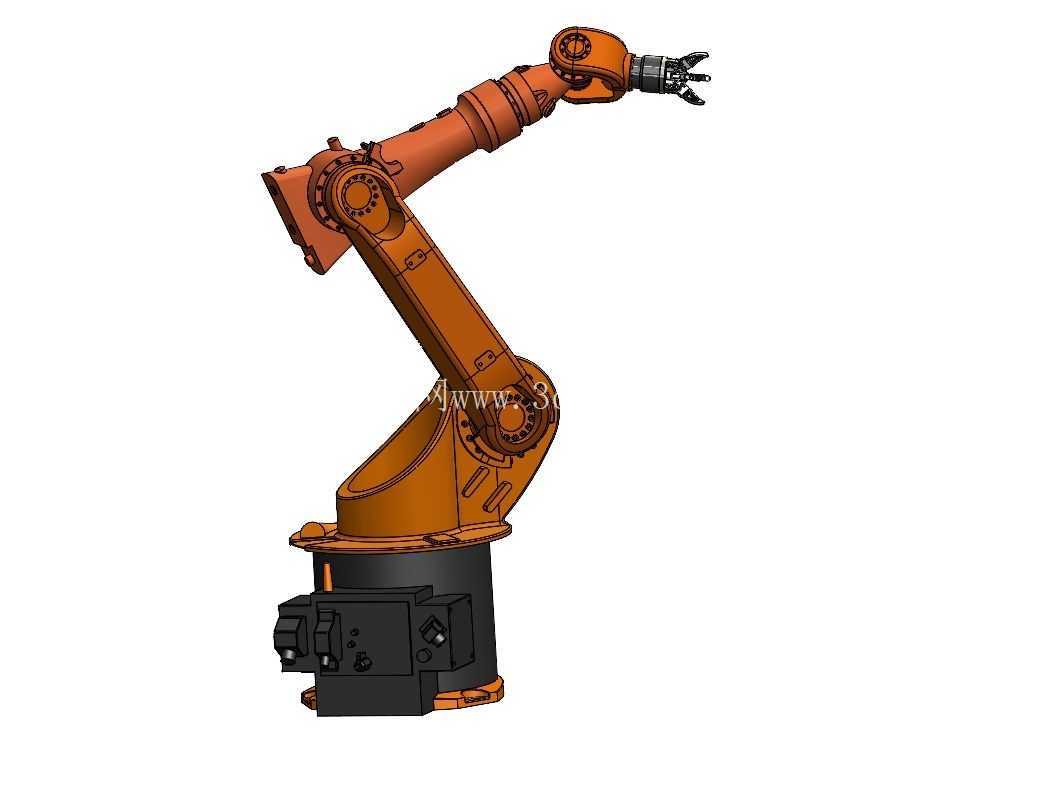
单臂机器人是一款旨在模仿人臂运动的机械臂。它采用伺服电机构建,并由微控制器(例如 Arduino 或 ESP32)控制。该机器人可以执行诸如拾取和放置物体、旋转和举升等任务,使其成为自动化、教育和实验的理想选择。本项目侧重于机械设计、电子元件和编程。该机械臂由多个关节(基座、肩部、肘部、腕部和夹爪)组成,每个关节均由精确的电机运动控制。利用运动学原理,可以对机器人进行编程,使其到达特定坐标并执行重复任务。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering

















