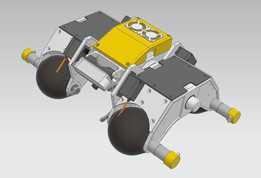
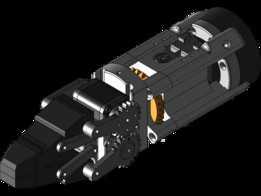
适用于 Unitree G1 的夹爪/爪子

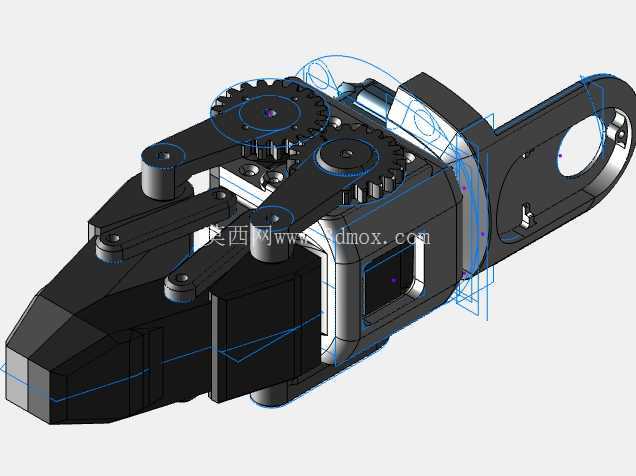
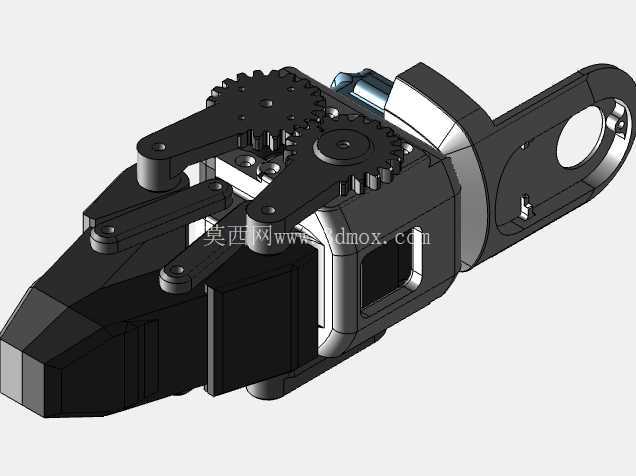

这是我在实习期间完成的一个任务,制作了这个机械臂夹爪。它使用 G1 连接器固定在机器人前臂上,并用 4 个 M3 沉头螺丝固定。安装位置是为 Dynamixel AX-12A 设计的(文件位于 library/dynamixel-ax-12a)。STL 文件是 ESP32 的支撑结构。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,Rendering