斯图尔特平台

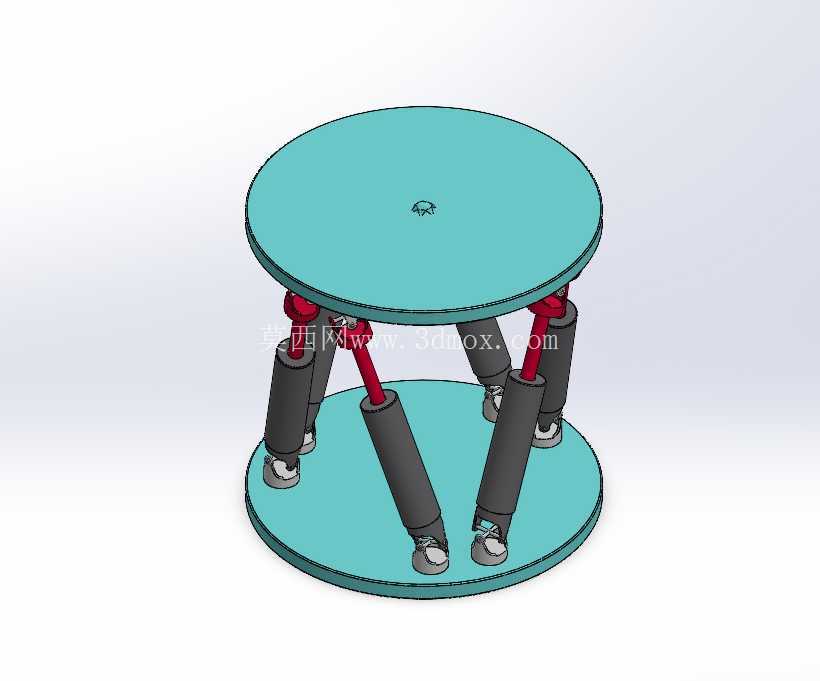
斯图尔特平台(六足机器人)是一种并联机械臂,可通过其执行器的协调运动提供六个自由度。该设计由两个圆形平台通过六个配备球形关节的可调连杆连接而成,确保了运动的稳定性和灵活性。斯图尔特平台因其在飞行和驾驶模拟器以及精密定位系统中的应用而广受认可。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering