

Actobotics 机器人把手





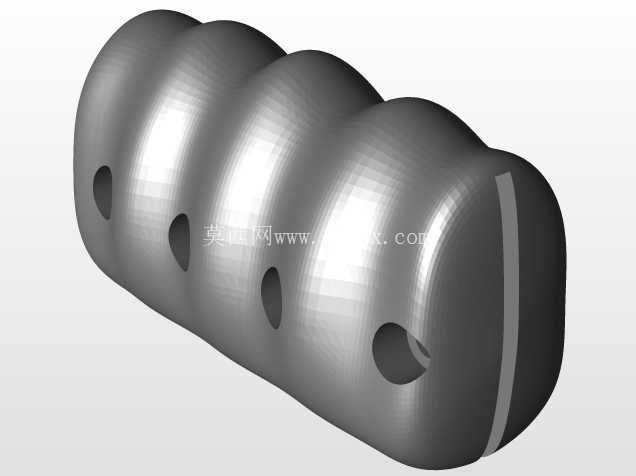


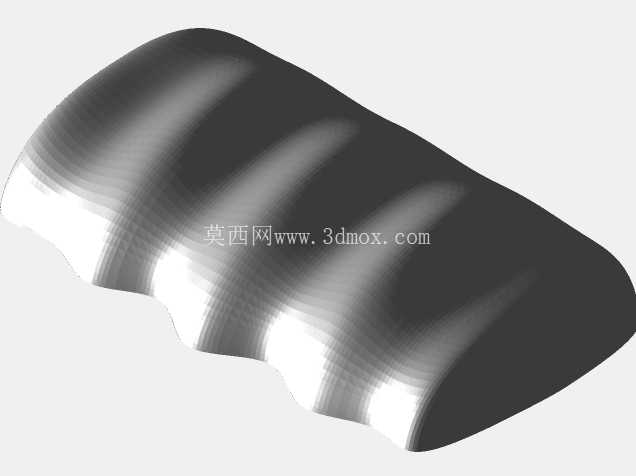
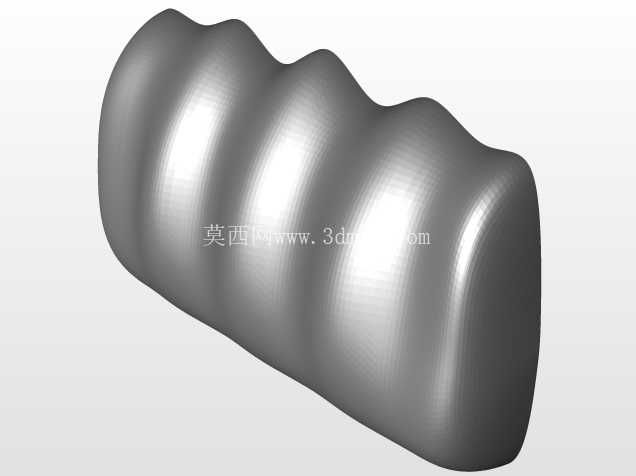
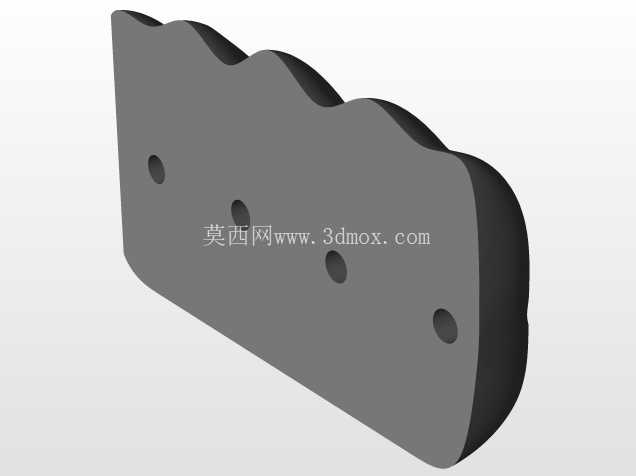
这些把手能帮助您轻松拿起和移动机器人。今年,我们的机器人要推动 42 磅(约 19 公斤)的重量,这些把手简直是救星。它们在 Fusion 360 中使用 T 型样条体建模,符合人体工程学设计。把手的尺寸适合我们团队所有成员的手型,而我们团队的成员手型各异。把手可以套在 Actobotics 的定位板上,这样重量几乎直接传递到定位板上,而不是由 3D 打印件承受。左侧把手上有一个插旗孔。这个孔的大小应该足以容纳我见过的所有机器人旗帜。把手上的旗帜位置还能帮助像我这样健忘的教练在比赛结束后记得把旗帜交还到排队台。另外需要注意的是:一体式把手在打印过程中有时会倾倒。我们的左侧把手在打印时可以直立放置,打印效果很好,但右侧把手连续 7 次都失败了。根据您的打印机,您可能需要分两部分打印,而不是将两部分一起打印。我已经将两种打印方式都包含在文件中了。
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering




















