自平衡滑板车
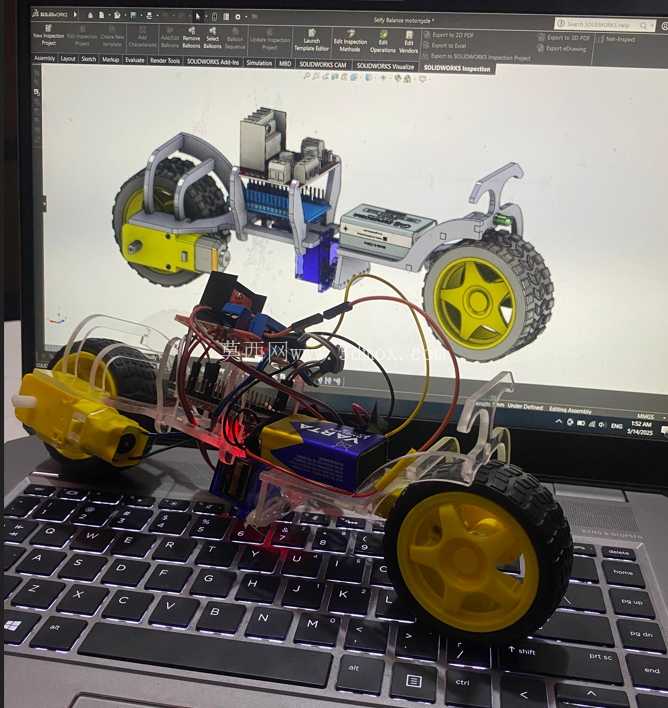

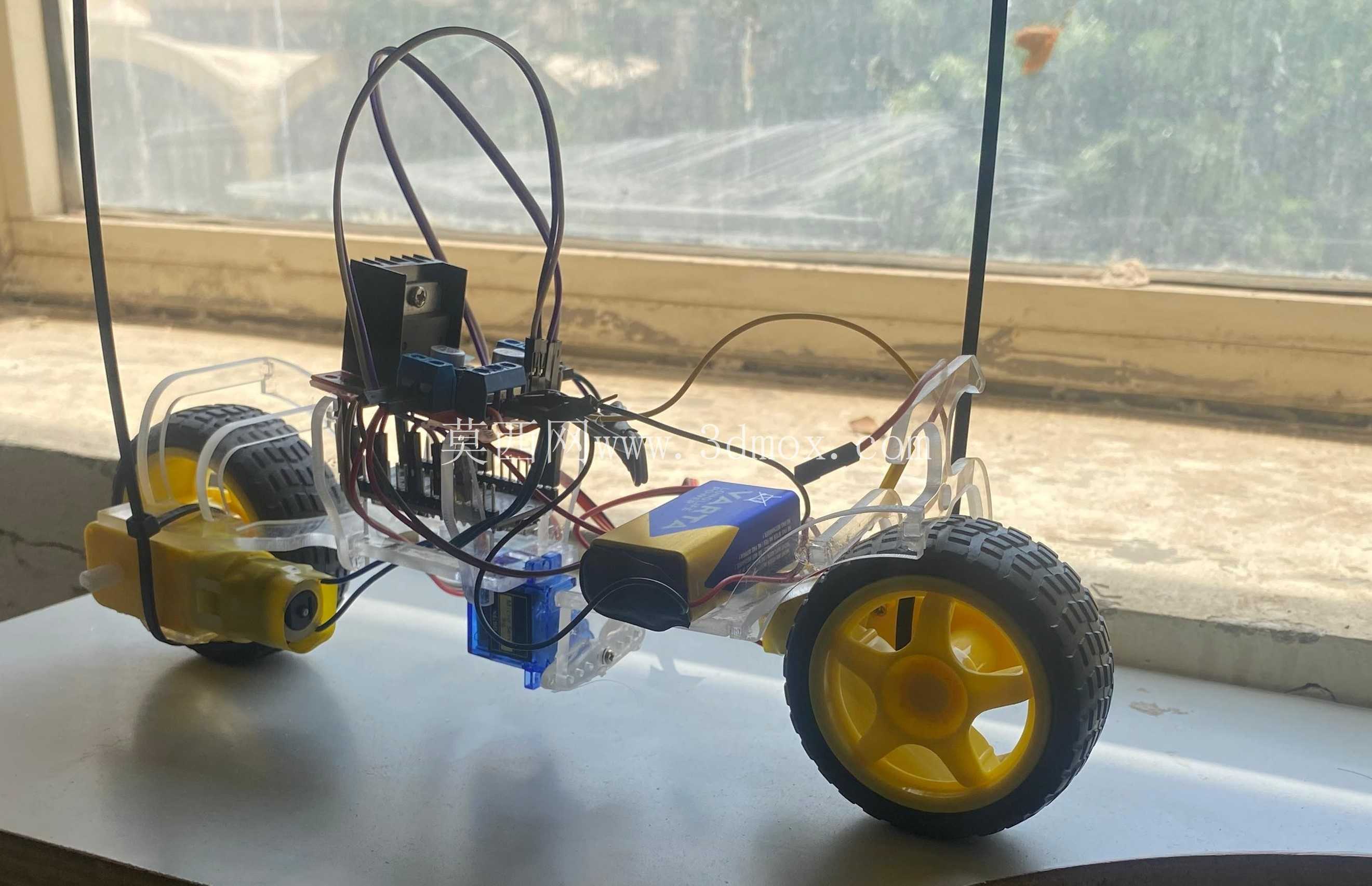
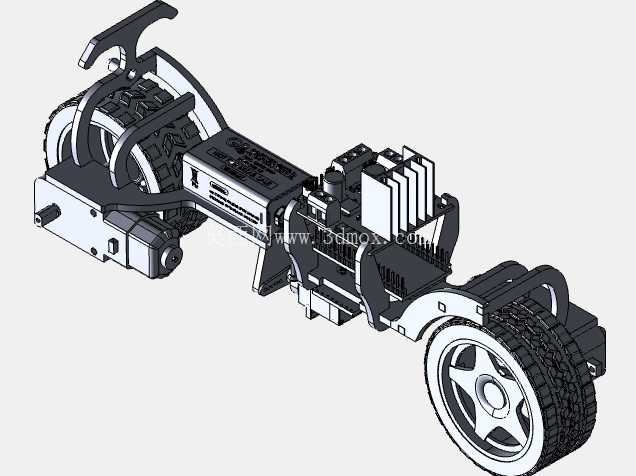
这个项目是进入嵌入式系统和机器人世界的一小步。 该滑板车使用 ESP32 微控制器和 MPU6050 陀螺仪模块进行自主维护。设计背后的核心思想简单而强大:通过实时传感器数据处理和 PID 控制算法实现自平衡行为。 尽管是一个基本原型,但它展示了将低成本组件与智能控制逻辑和手机应用程序相结合的潜力。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering