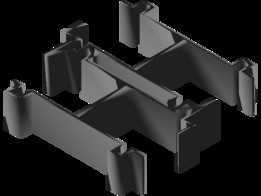
完全设计的机器人(仿生)手掌,带伺服室










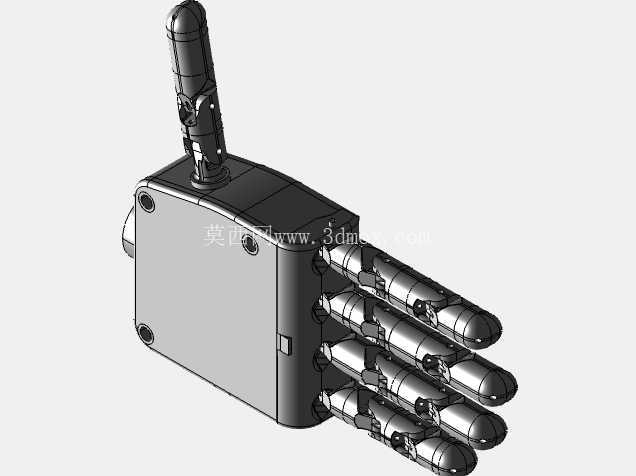





这是一个肌腱驱动的仿生手掌,使用 6 个舵机。 两个舵机用于拇指,其余 4 个舵机用于其他 4 个手指。 不包括第六个伺服设计,因为它被安装在连接到手掌的手臂中。 这个设计考虑了伺服器外壳、螺栓和螺母、腱驱动器和路线。使用的伺服器选择是 MG90S,请随意使用,并确保您参考我的工作。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,3D Manufacturing Format,STL,Fusion 360