EUROBOT 2017 ͻ��˹
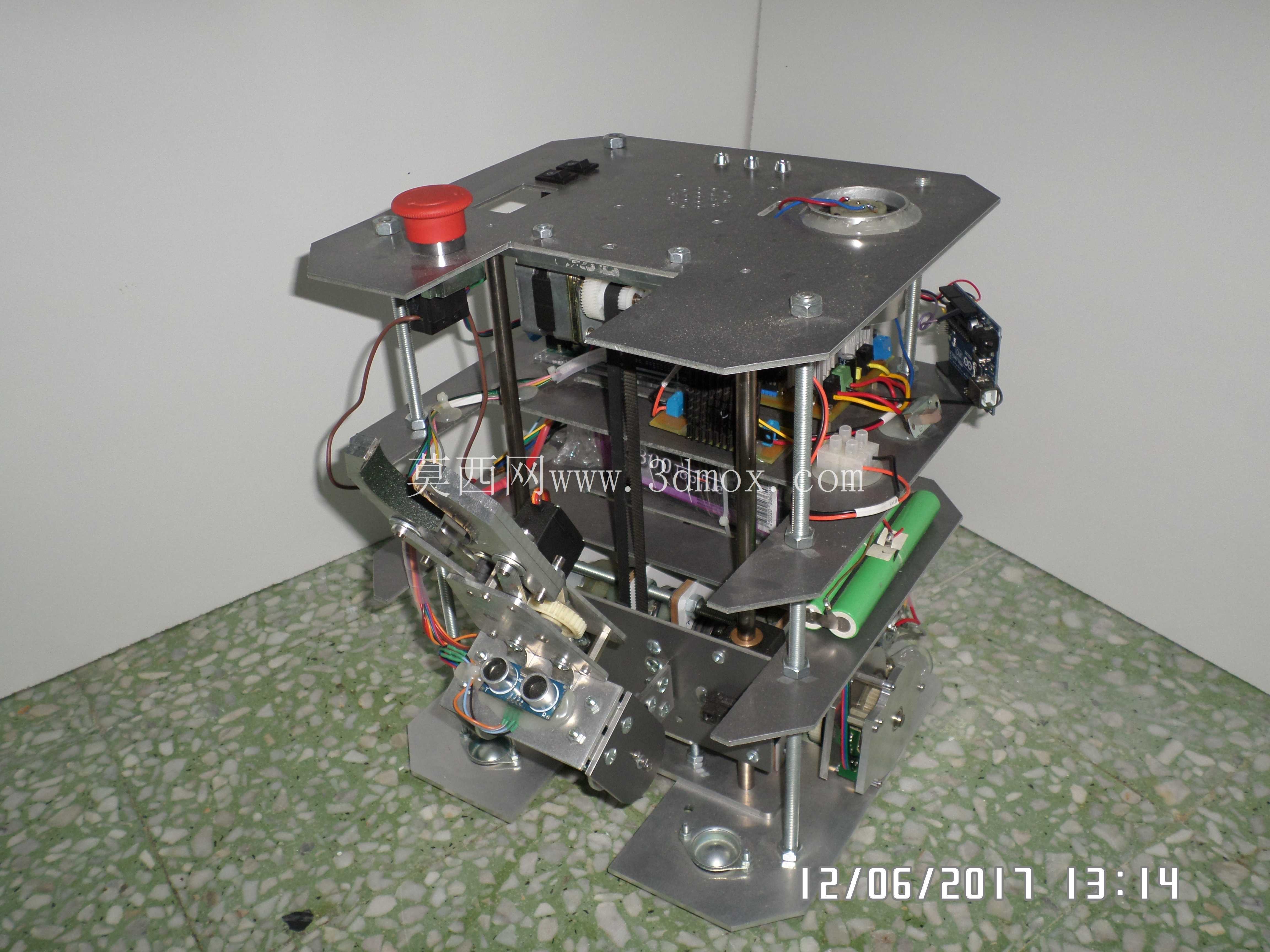
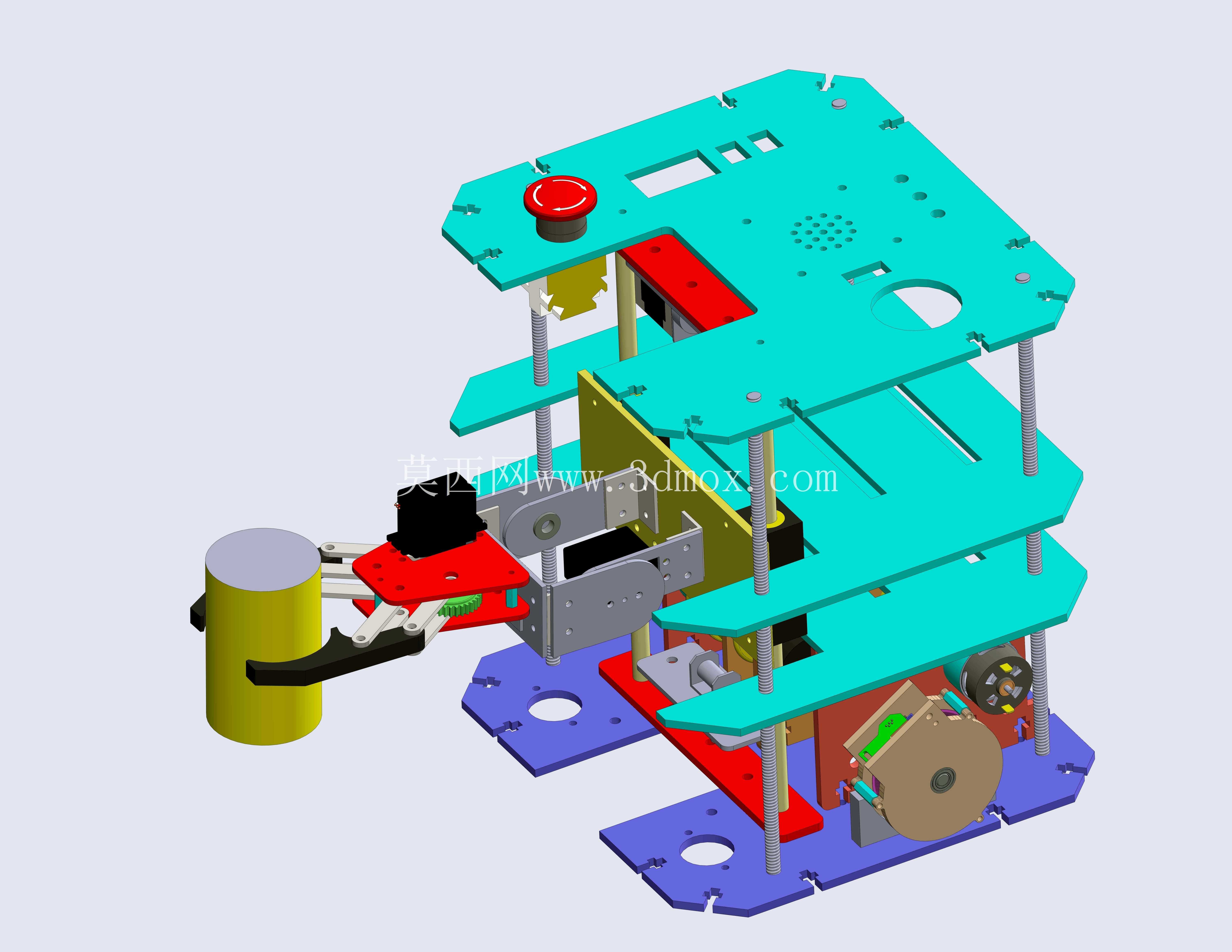

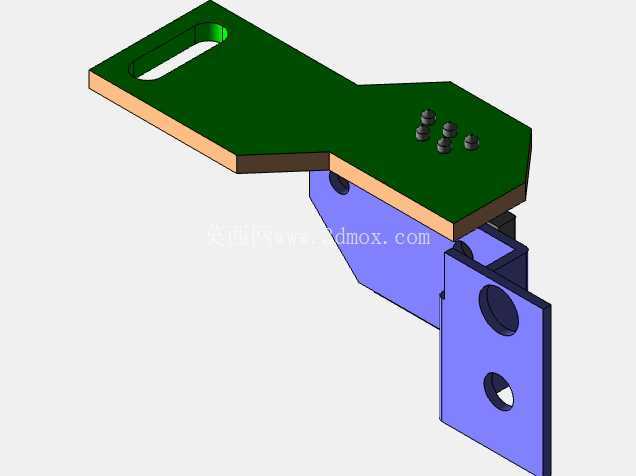

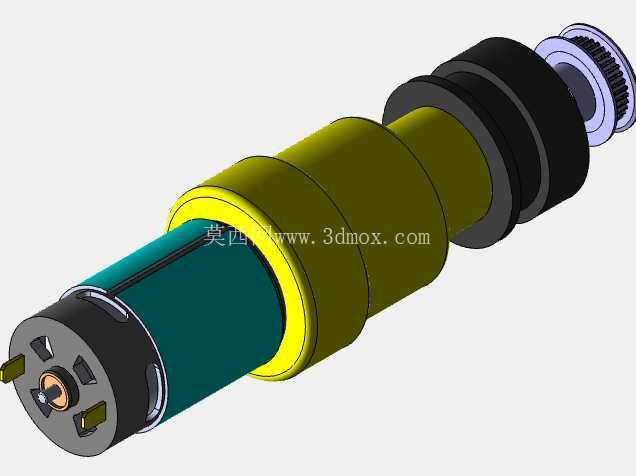





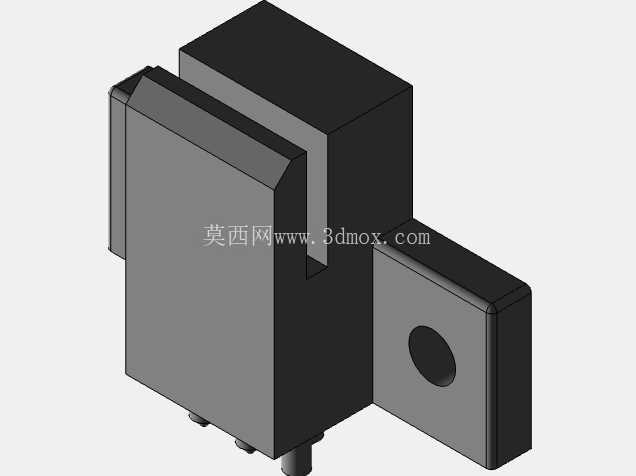
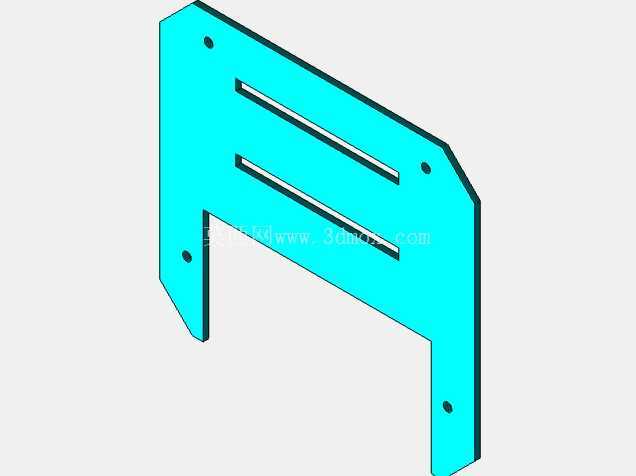
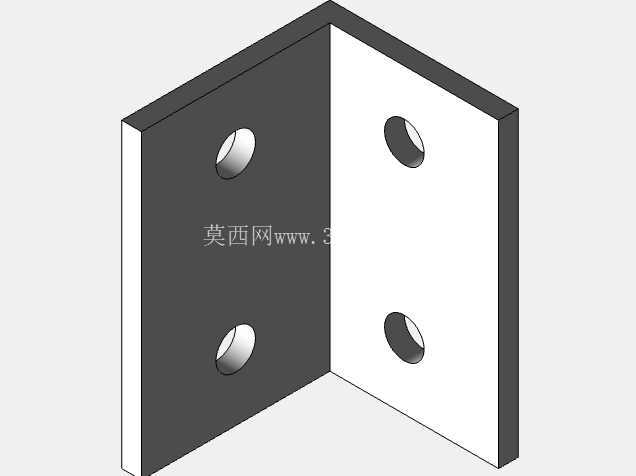
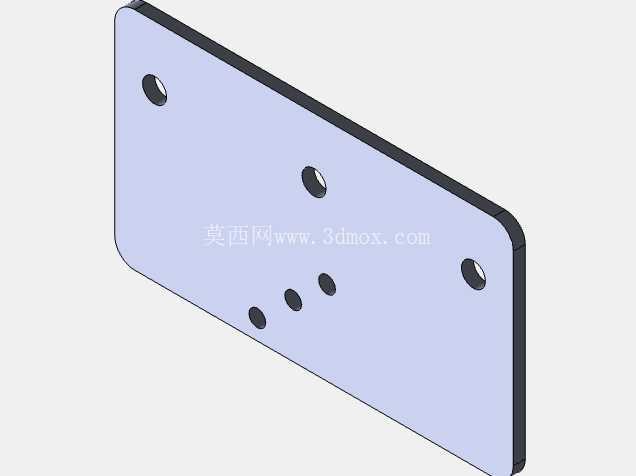
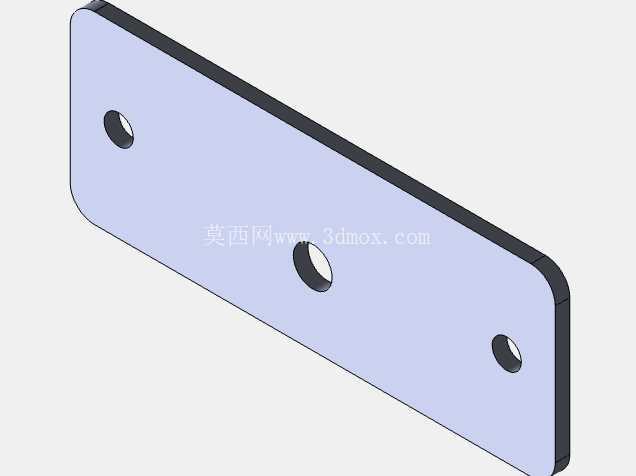
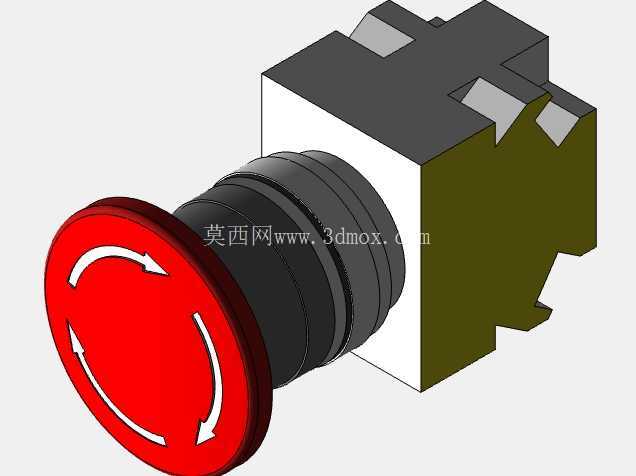



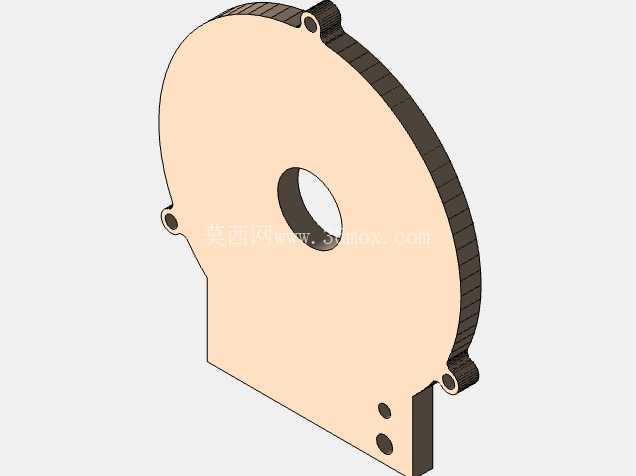
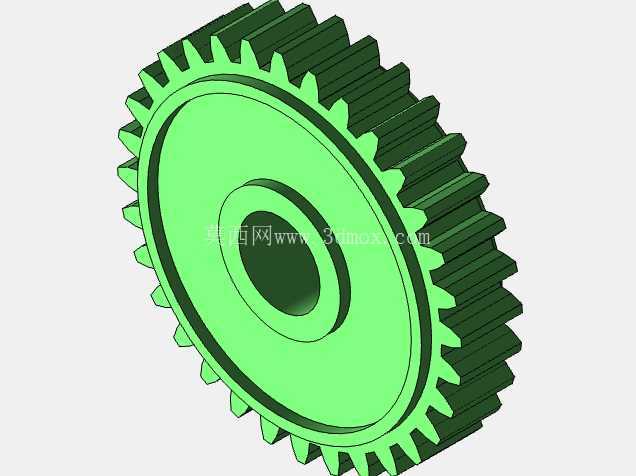
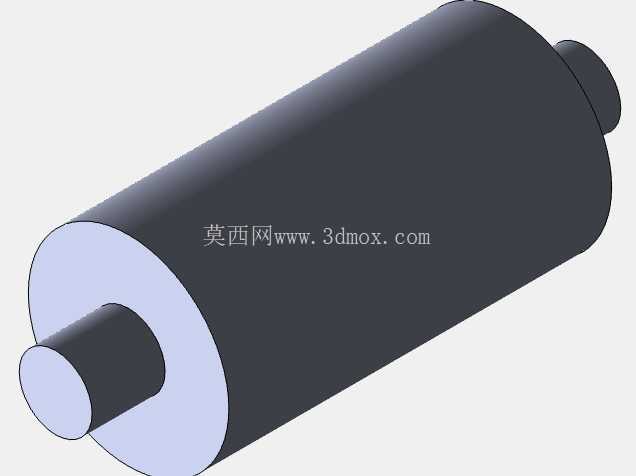
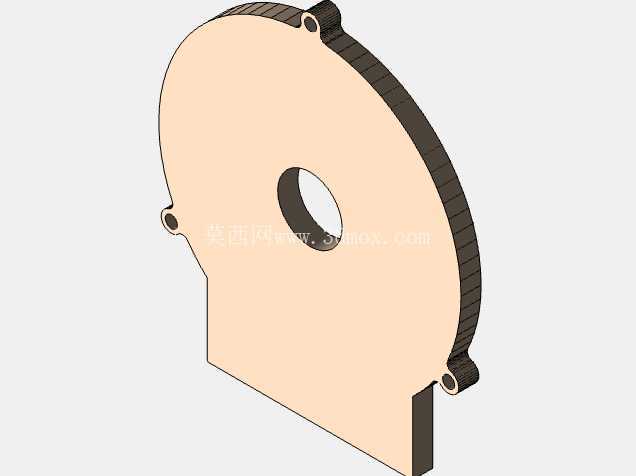


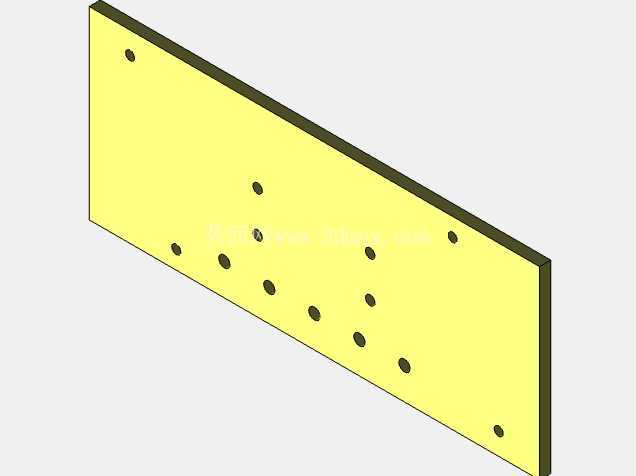
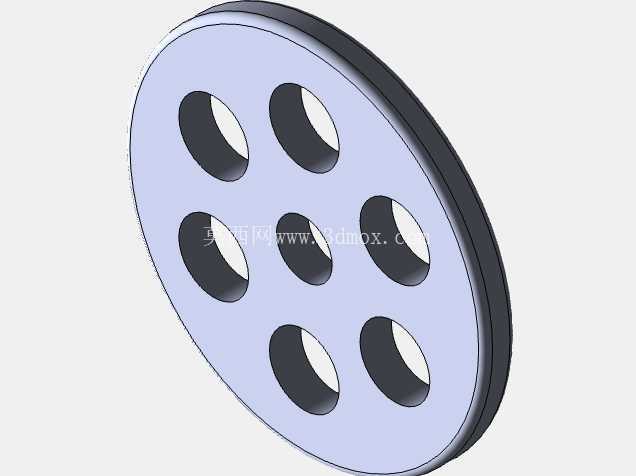
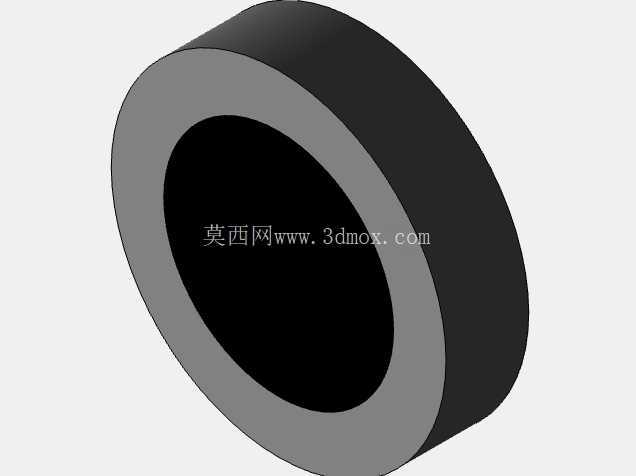
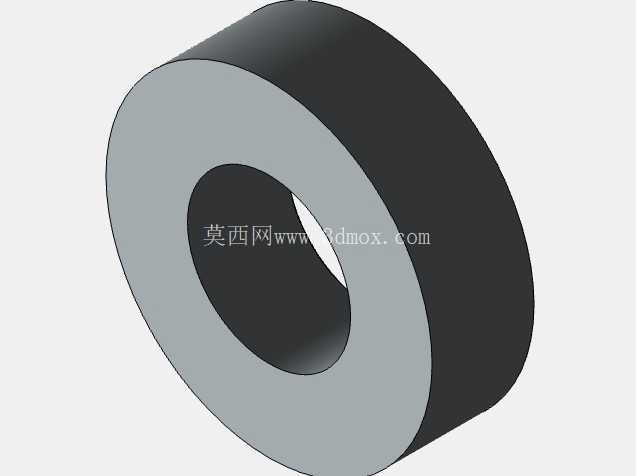


�ҵĻ����� Eurobot 2017 �C ͻ��˹�� 2017 �꣬�ҽ���ͻ��˹�ٰ� Eurobot �����˾����� Ce projet a ��t�� un d��fi technology badnant, o�� j��ai mi en ?uvre mes comp��tences en ?uvre mes en mechanique, electronique etprogrammation pour concevoir un syst��me Performance et optimise pour les ��preuves du concours.Conception et M��caniqueMon robots ��tait bas�� sur un syst��me de domotique embarqu��, �Ż��Ծ�ȷ������� Il utilisait :Moteurs �� courant continu (DC) avec un control de vitesse pr��cis.Un moteur pas �� pas d��di�� au syst��me de monte-charge, permettant unpositionnement pr��cis des objets.Unservomoteur pour actionner une pince et manipuler des ��l��ments du jeu.Une Structure Robuste Combinant ���ƺ� 3D ���������Ӻͱ�̻�����ͨ�� Arduino ���п��ƣ�ȷ����ͬ�����ߺͲ����ߵĹ����� �˶��Ļ���ԭ���ǻָ�����λ�ã��������ܵķ������ֹ۵Ĺ켣�����Լ���Ŀ����ϰ��� Il int��grait :Des capteurs de ligne pour ajuster sa trajectoire en temps r��el.Divers capteurs pour la d��tection d��objects et d��obstacles.Une Battery LiPo, garantissant une alimentation stable et une autonomie suffisante pour toute la dur��e du match.Performances et ���Grace �� cette idea, mon robots a r��ussi �� accomplir ses taches avec effic
������acit�� lors des matches�� �������������س��װ�ÿ���ʵ�־�ȷ��������ݣ����ҿ��Ա�֤λ���Ż�ϵͳ�ڵ����ϵ�����Ϳ��ٵ���������ŷ������ 2017 �ľ������������˺��Զ�����������ơ� ������������˻�е�����Ӻͱ����һ��������Ӧ�ó���Ϊδ������Ŀ�ṩרҵ֪ʶ��
- ��һƪ��Helix Darrieus С��ˮ����Ŀ�������������
- ��һƪ��jmd

- ȫ�����ۣ�0��

- ģ�ʹ�С ��δ֪
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��SOLIDWORKS,Rendering