全向球壁穿越机器人
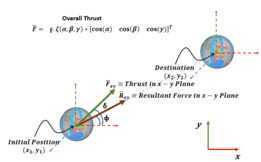
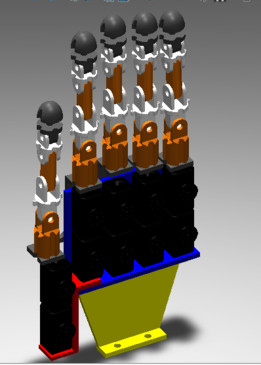
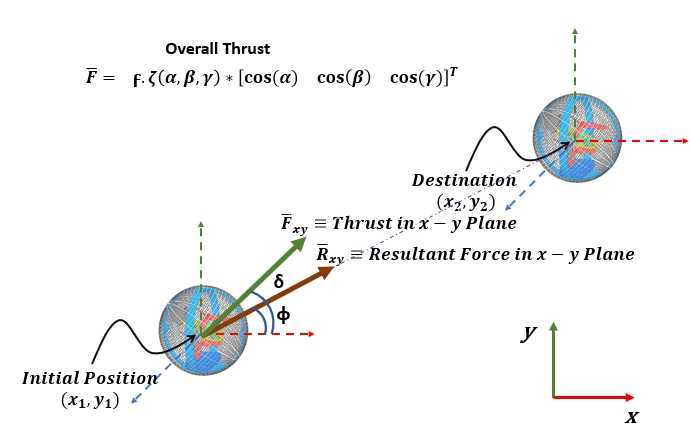
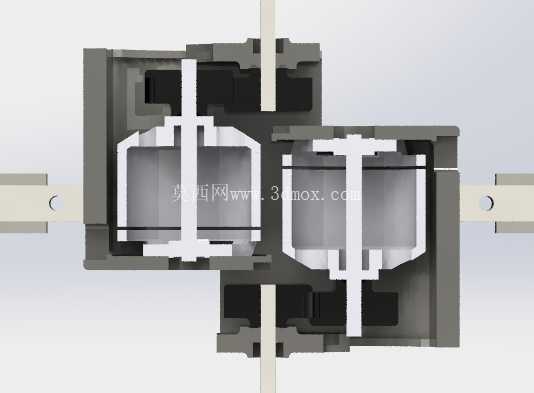
全向球壁穿越机器人(OsWalT)是一种能够在表面上爬行且不受其倾斜度影响的球形机器人。 我正在研究它的原型和动态建模。 其万向节机构允许其将推力引导到任何方向,并且其强大的 BLDC 电机用于改变推力的大小。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,Rendering



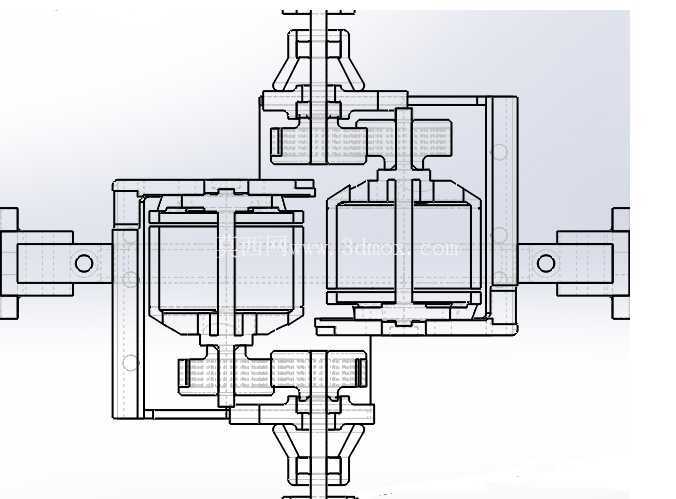
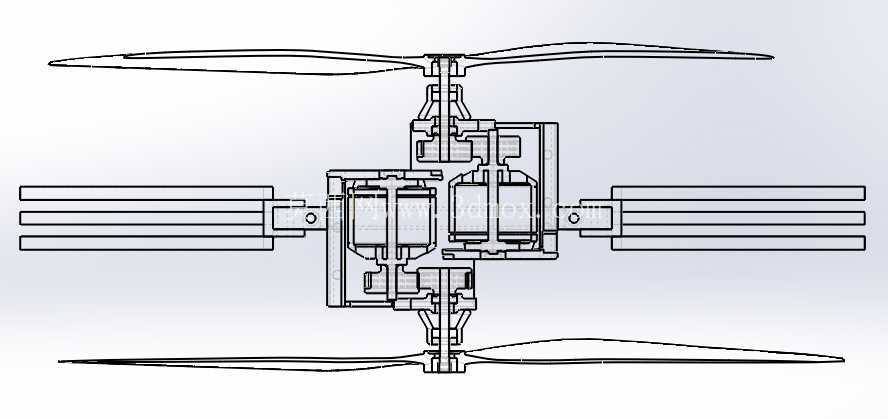



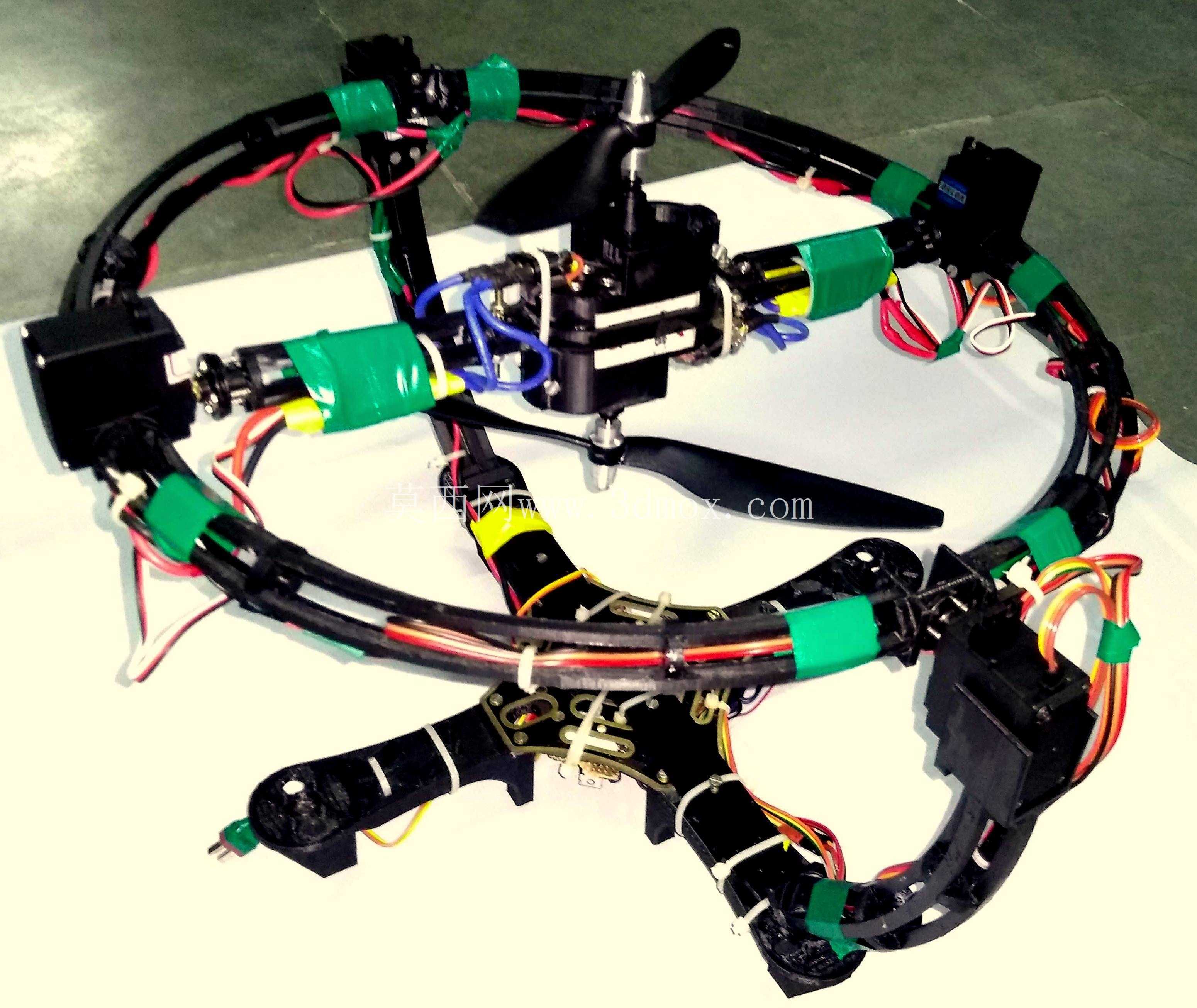



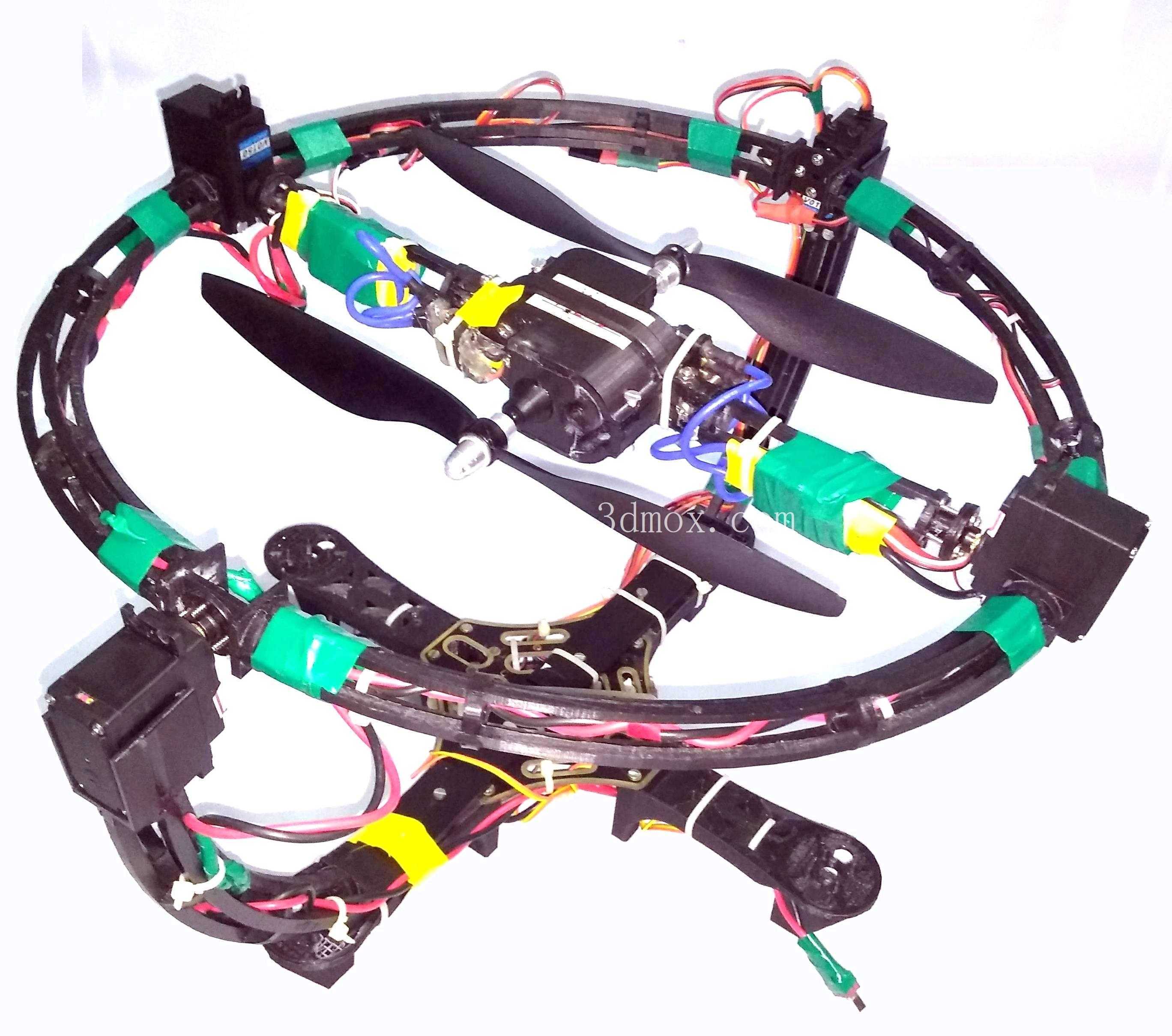


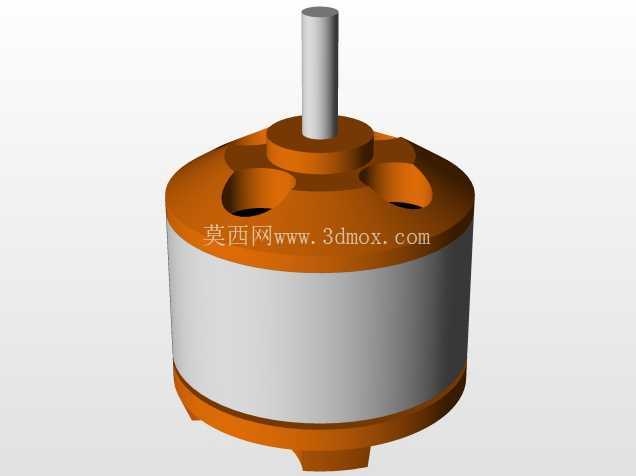

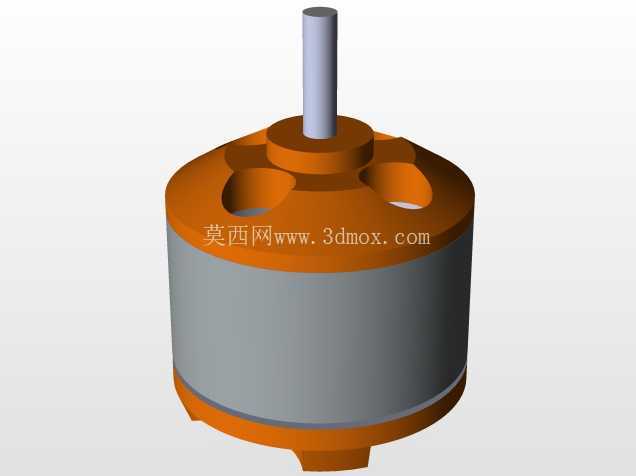









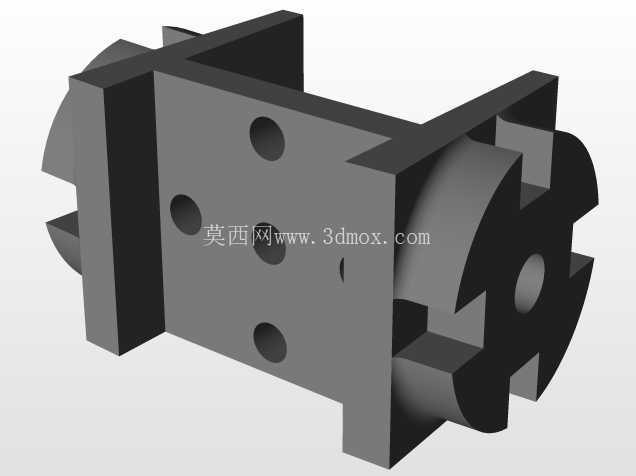

全向球壁穿越机器人(OsWalT)是一种能够在表面上爬行且不受其倾斜度影响的球形机器人。 我正在研究它的原型和动态建模。 其万向节机构允许其将推力引导到任何方向,并且其强大的 BLDC 电机用于改变推力的大小。