飞行遥测无人机系统,ESP32 + nRF24 + 传感器
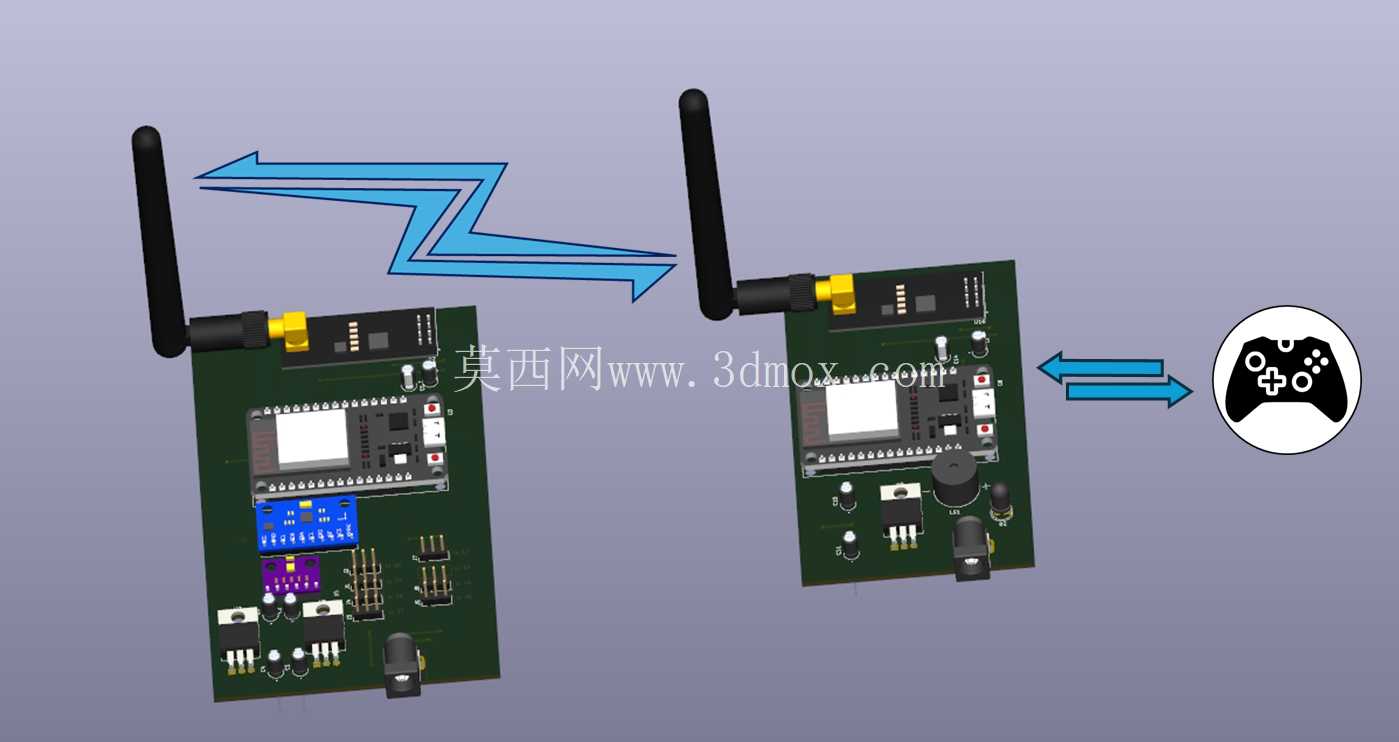
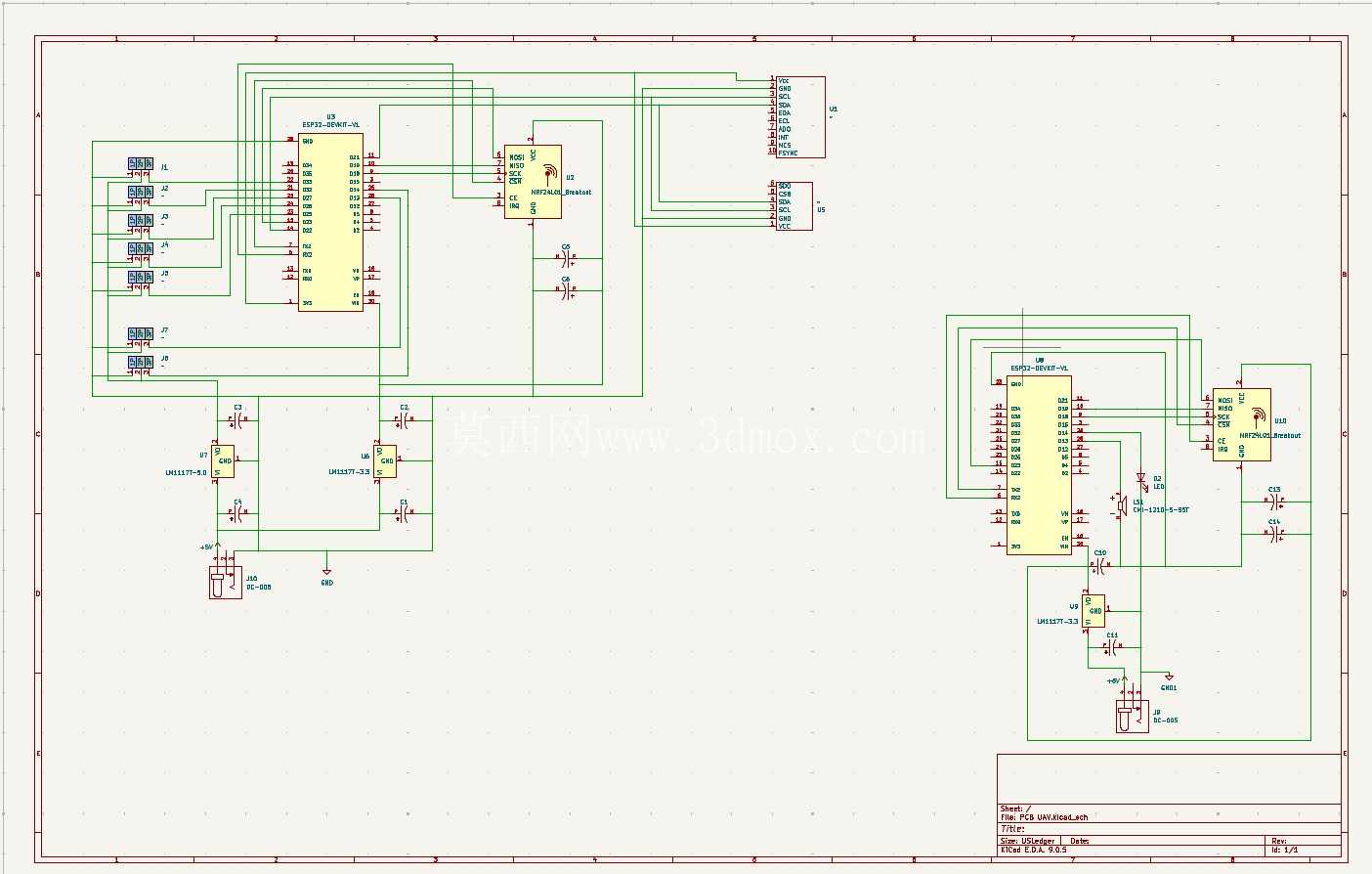
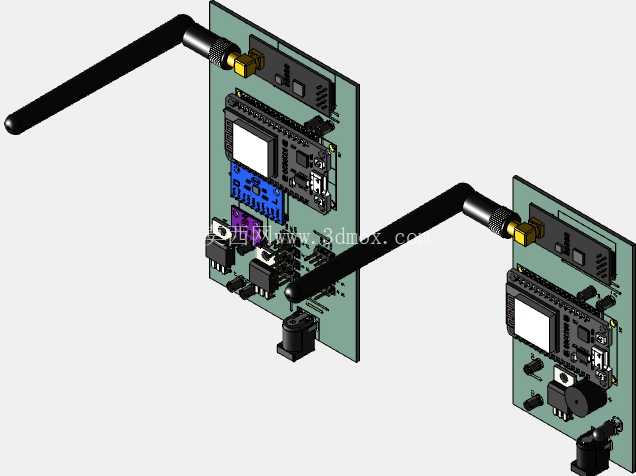
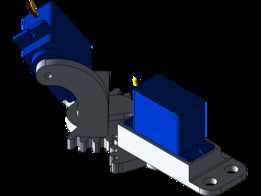
该项目目前正在积极开发中。代码可以在以下 GitHub 链接中找到:https://github.com/CarlosA1804/uav-flight-controller-esp32-nrf24-controllerBLE该设计由两个 PCB 组件组成:发射器板(左)和接收器板(右)。 每块板均围绕 ESP32 和 nRF24L01+ 射频通信模块构建。发射器板(左):ESP32 开发模块:负责数据采集和处理的主微控制器带 SMA 天线的 RF24L01+ 模块:用于无线通信的 2.4 GHz RF 收发器环境/运动传感器模块(安装在接头上):用于测量物理变量(例如压力、温度、IMU 数据)电压调节器(线性调节器) TO-220 / SOT 封装):为 ESP32 和传感器提供稳定的电压轨 无源组件(电容器、电阻器):滤波、去耦和信号调节 排针/扩展连接器:允许模块化传感器集成直流筒插孔:外部电源输入接收器板(右):ESP32 开发模块:处理数据接收和处理 带 SMA 天线的 RF24L01+ 模块:接收遥测数据并支持双向通信蜂鸣器:音频反馈或警报 信号发送按钮:用户输入或系统控制(例如复位或模式选择)电压调节器:确保稳定的电源电容器和电阻器:滤波和稳定直流桶插孔:电源输入系统交互:发射器收集传感器数据并进行设置
通过 nRF24L01+ 链路找到它。接收器处理传入数据并可以提供反馈(音频或控制信号),并为外部控制输入提供可选的双向通信。
------分隔线----------------------------
- 上一篇:星链迷你碟形天线 - 3D 模型 (STL)
- 下一篇:飞行跑车

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering