机器人佩佩加
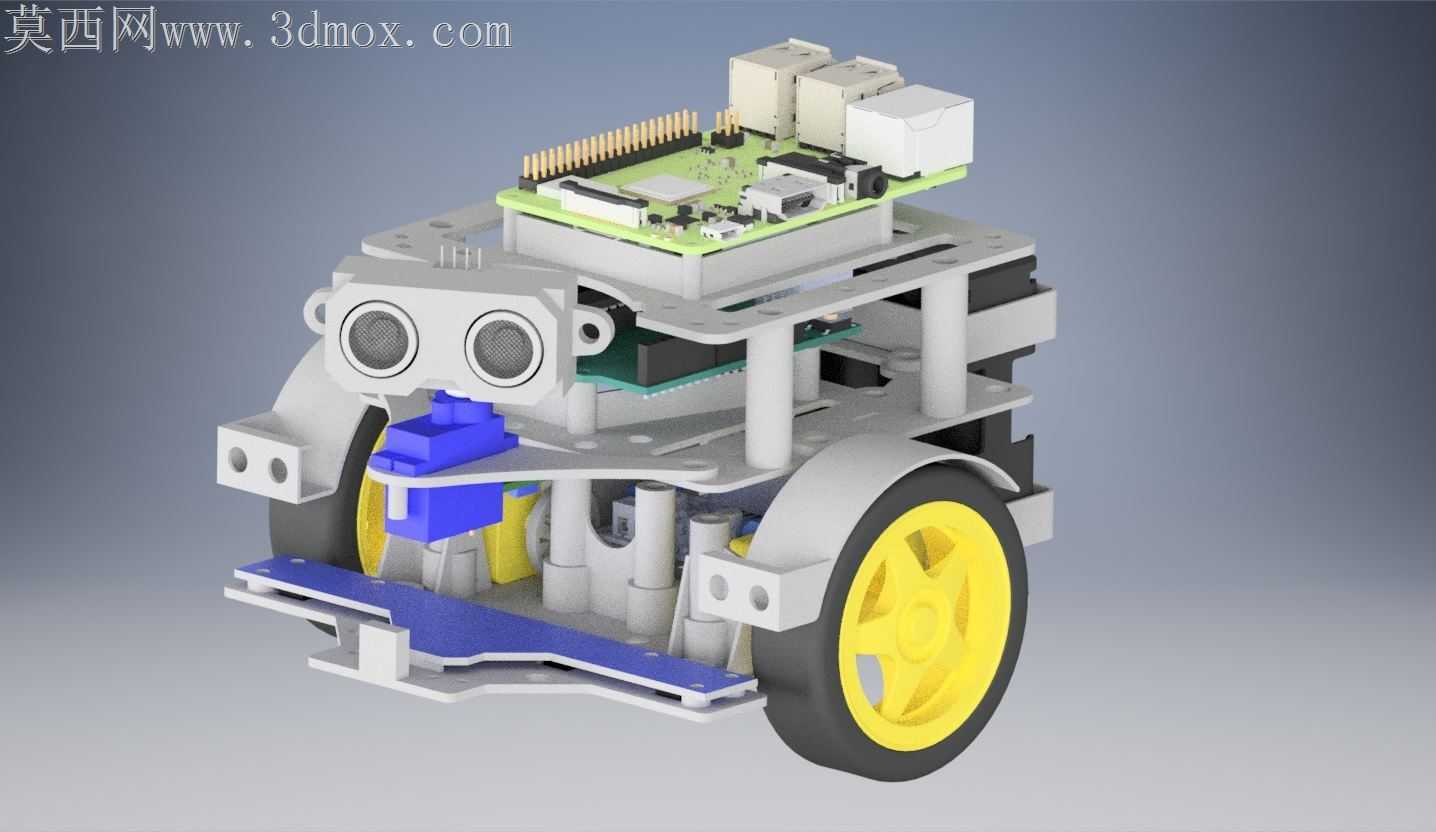
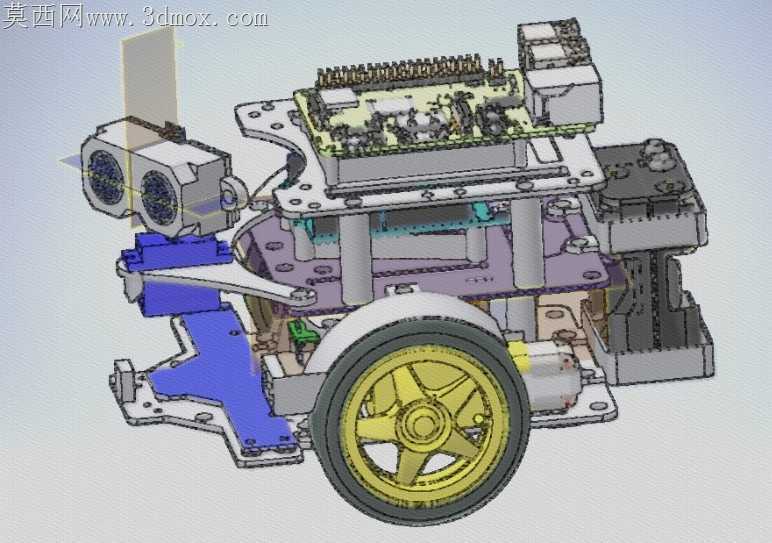

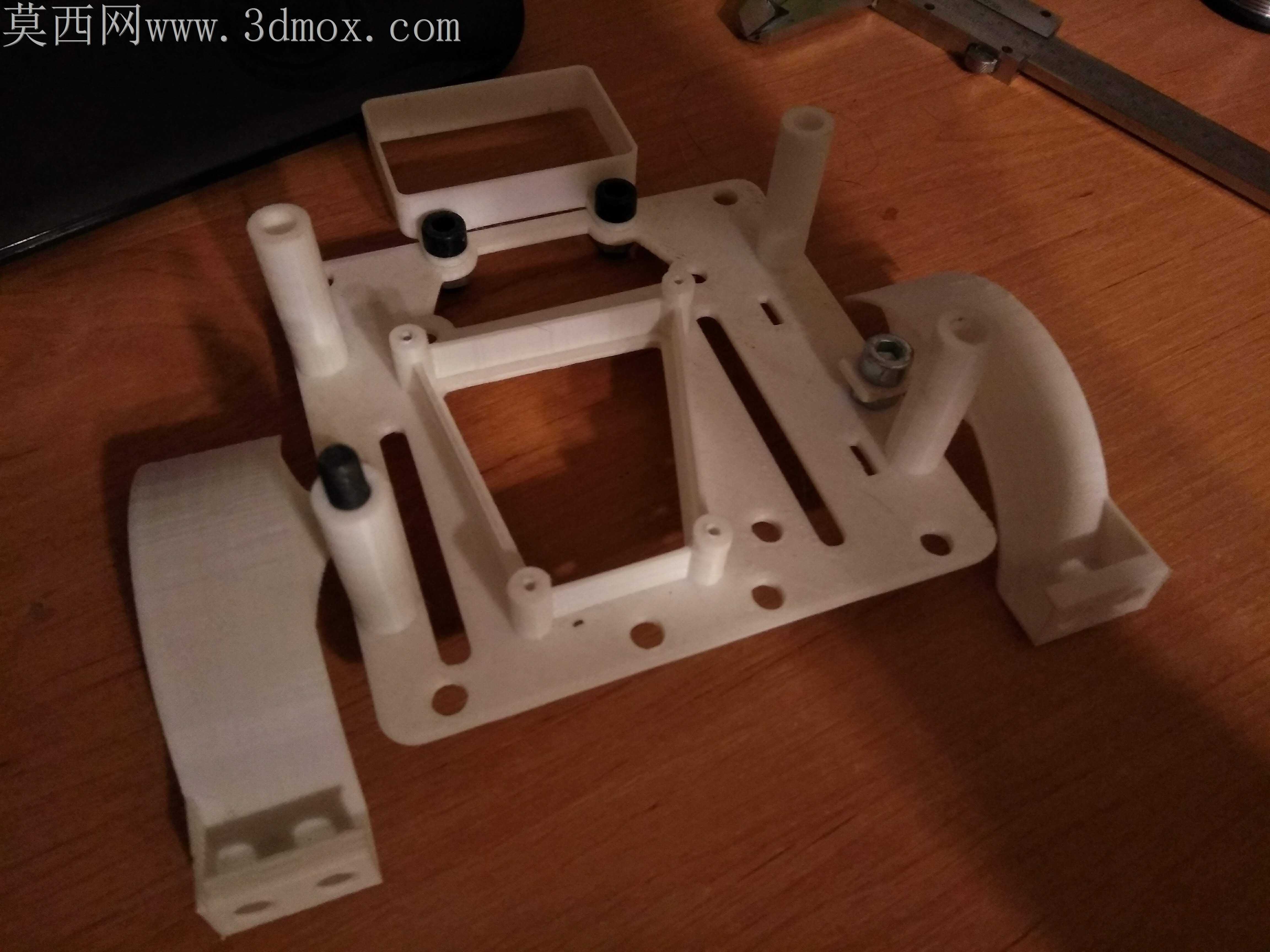


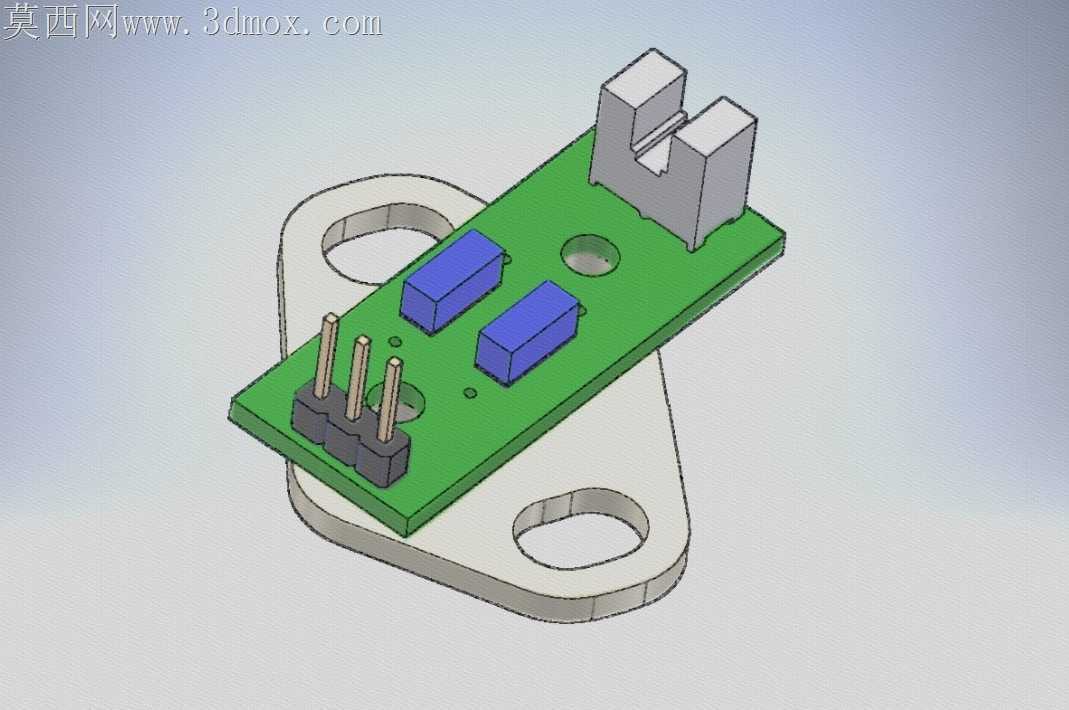

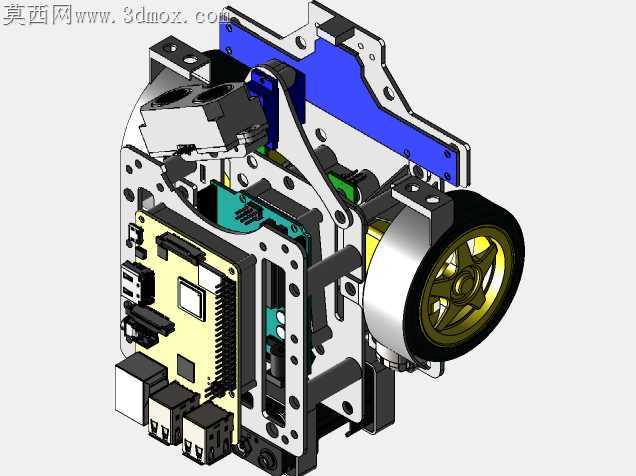
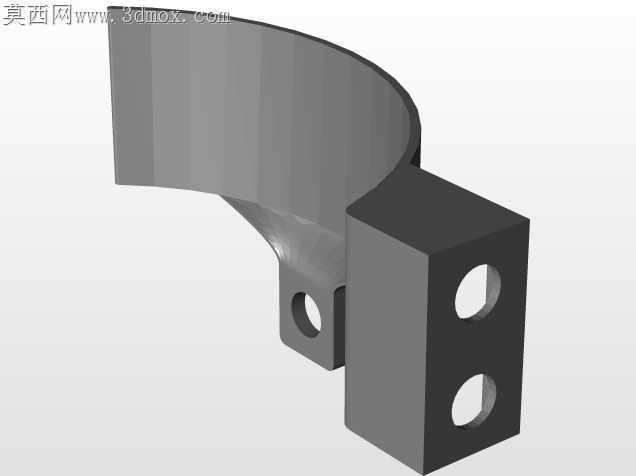
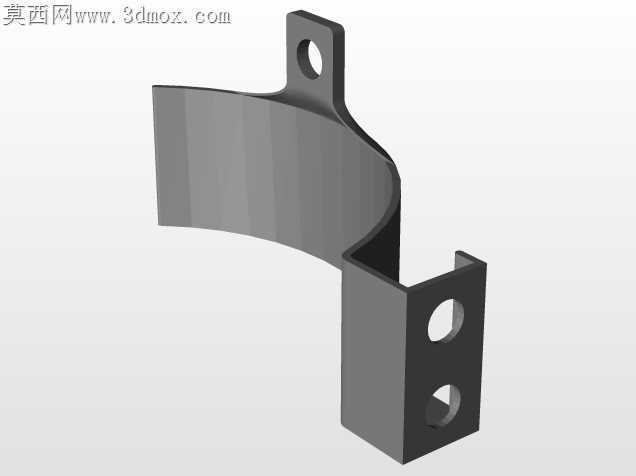
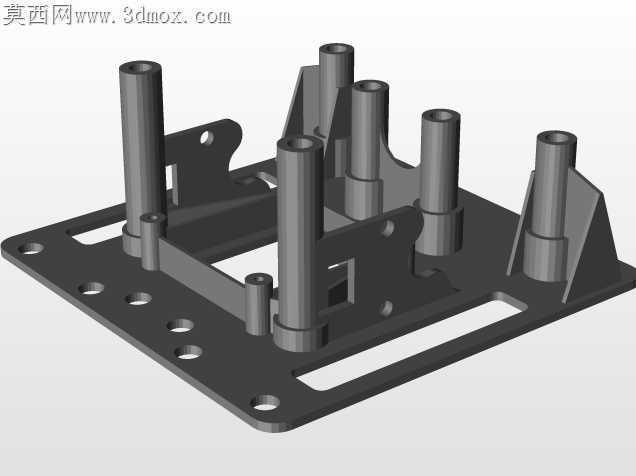
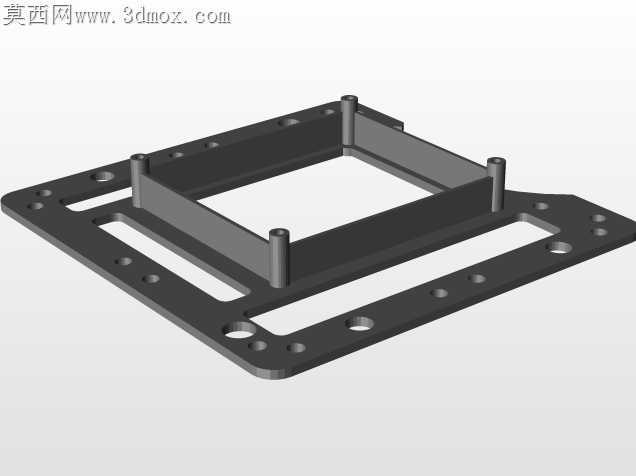
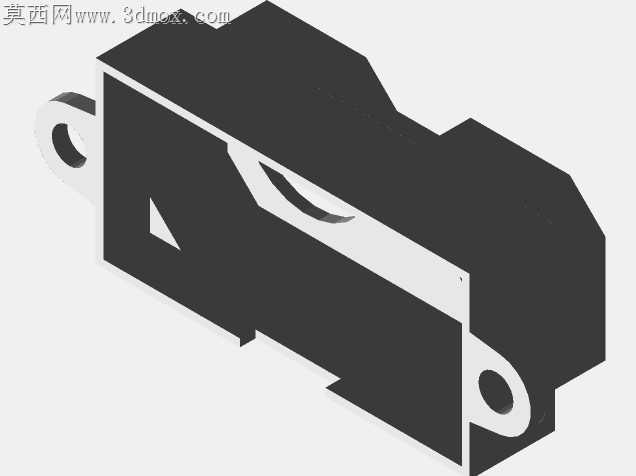
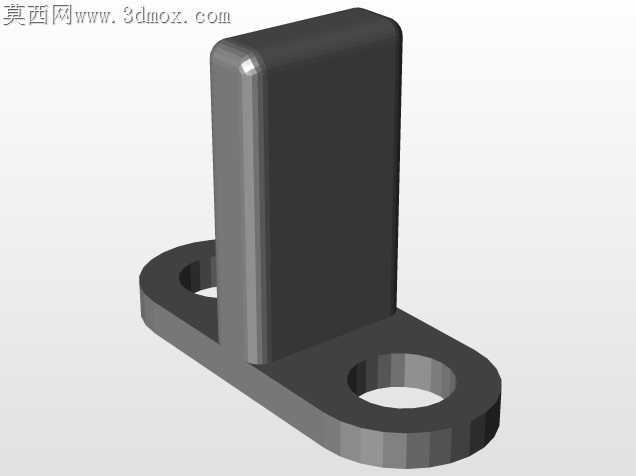
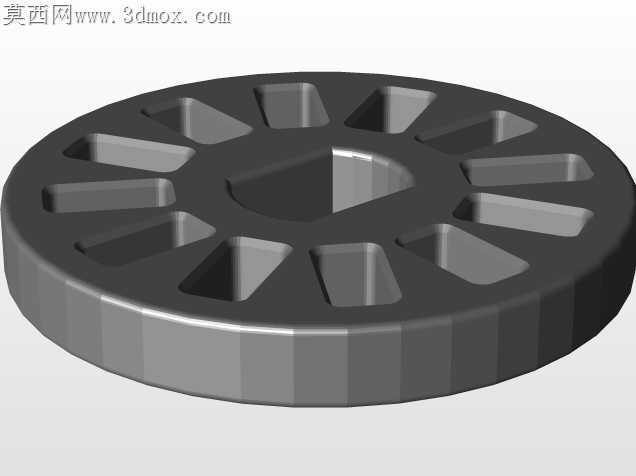
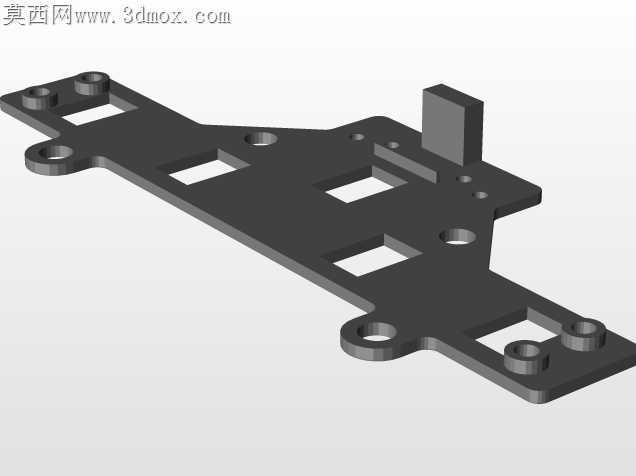
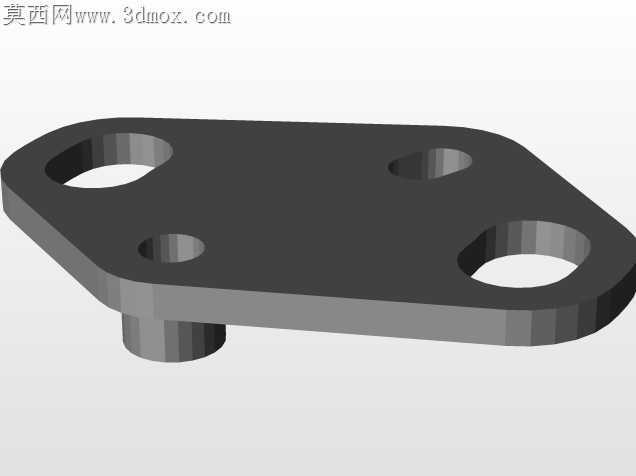
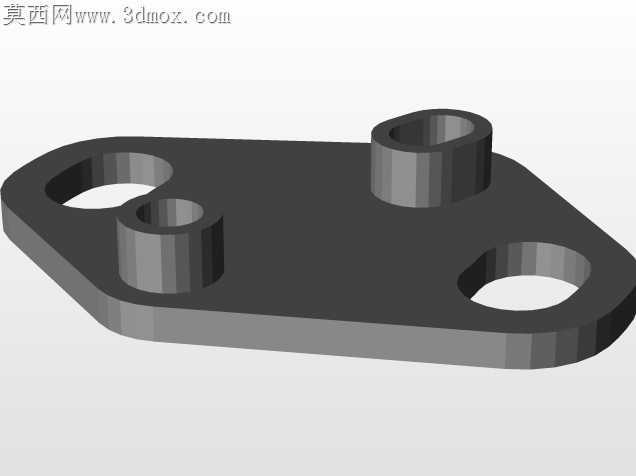
我正在设计一个简单的机器人,它的基本功能是便宜的,可以用3D打印机制作。Pepega主要负责理解和教授ROS中的基本编程:http://www.ros.org/Description/描述:两个带有光学位置编码器的直流电机提供驱动。L298N驾驶员发动机处于第一级。前面有一个酒吧,里面有五台红外线扫描仪,用来追踪黑线。后面是电源(6xAA可充电电池),下一层是Arduino UNO控制面板。两侧都有挡泥板,挡泥板上有4个5毫米LED的安装孔。前面还有一个传感器:一个旋转的超声波测距仪障碍物最后的第三层是覆盆子Pi 3微型计算机的位置,ROS将跑。跑机器人是为在基本的3D打印机上制作而设计的,例如FDM。打印区域必须至少为10x10cm。最佳热端直径为0.4mm,层厚为0.1~0.2mm。不需要产生支持。材料可以是ABS或解放军整个建筑都是用螺丝钉固定的。这个机器人可以制造额外的传感器模块,例如连接相机。购买c类组件:驱动器:2x TT直流电机L298N电机驱动器9g伺服计算机板:Arduino UNO Raspberry pi 3B+传感器:BFD-1000 HC-SR04打印零件:-bateryholder01.stl-bateryholder02.stl-布拉尼克.stl-布拉尼克_和平号- 正文.stl-车身2.stl-车身3.stl-box01.stl-box02.stl-克鲁扎克.stl-2个odecitani polohy kola 12德雷克・斯特尔-普雷德尼naraznik.stl公司- uchytsenzoru.stl公司-乌奇森佐鲁_米尔斯特尔特给出了机器人的功能:利用简单的传感器来探测环境并绘制地图。你可以接管这个程序来创建一个机器人,比如一个机器人吸尘器或者一个机器人割草机未来,我想用人工智能创造出自己制造的机器人,帮助每个人,得到所有枯燥烦人的工作。我们主要使用3D打印机来制造它们。我目前在捷克共和国利伯雷克技术大学学习机械工程型号:电池座HC-SR04-超声波传感器电机驱动控制器9G伺服电机Raspberry PI 3 B+Arduino Uno r3(说明中为屏蔽体)电机减速器-Rueda


- 模型大小 :52.13 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Other,STEP / IGES,Rendering