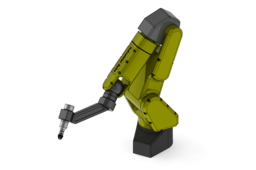
工业机器人手臂||工程Rami哈利勒
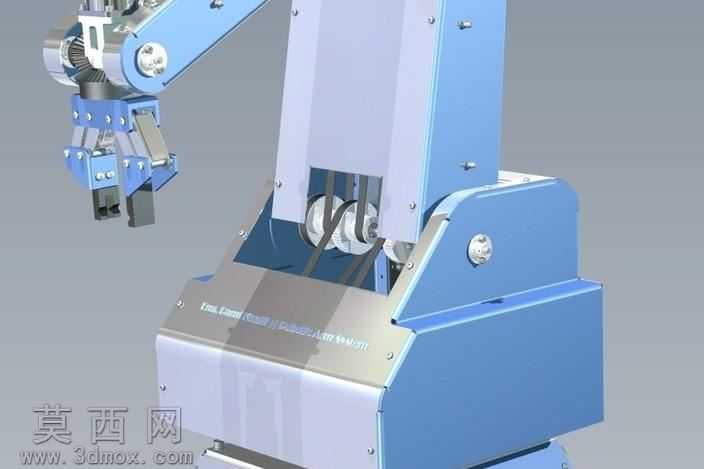
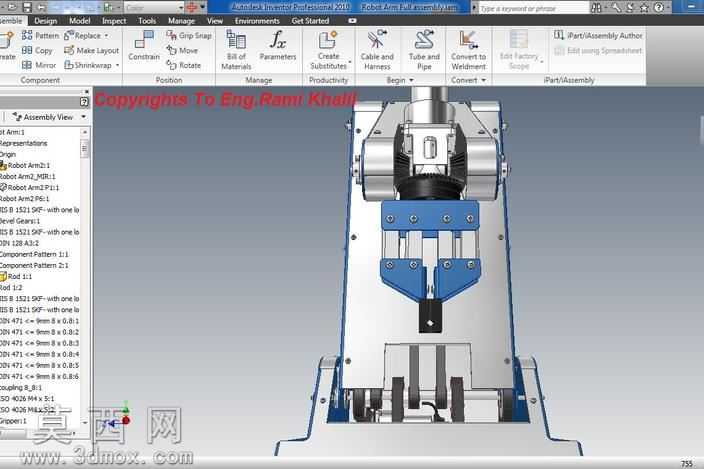
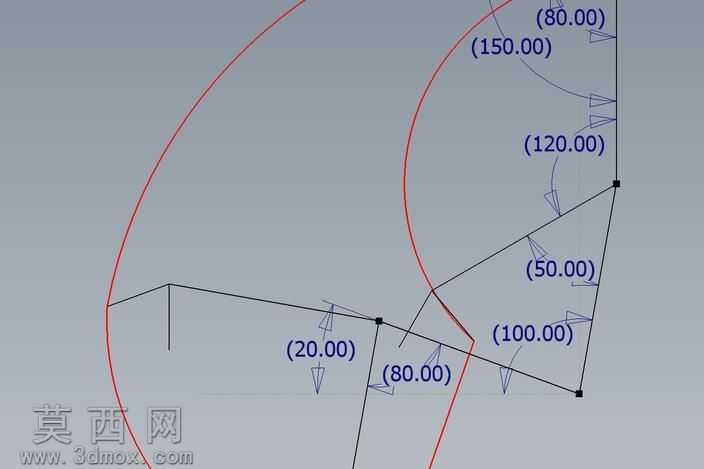
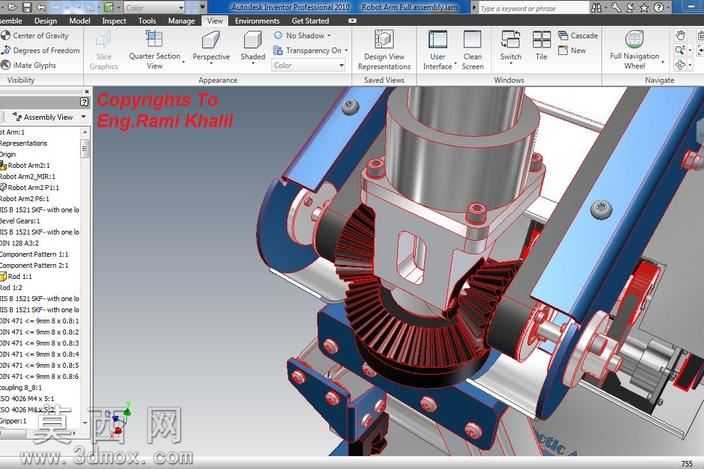
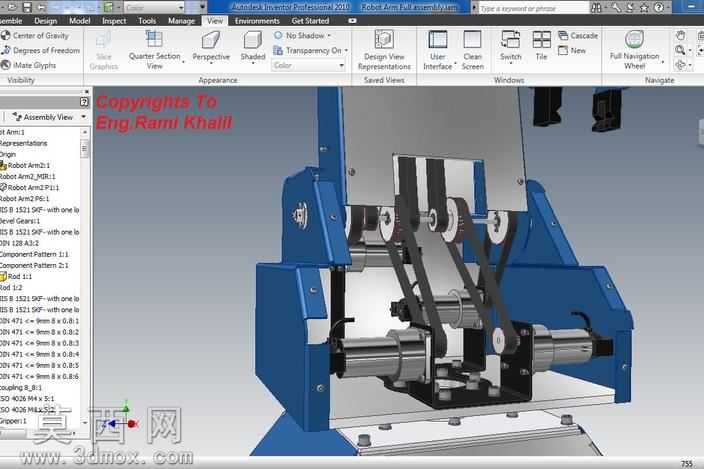
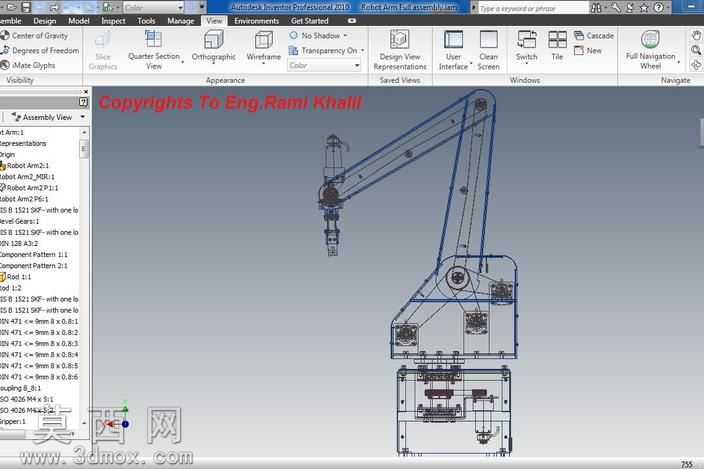

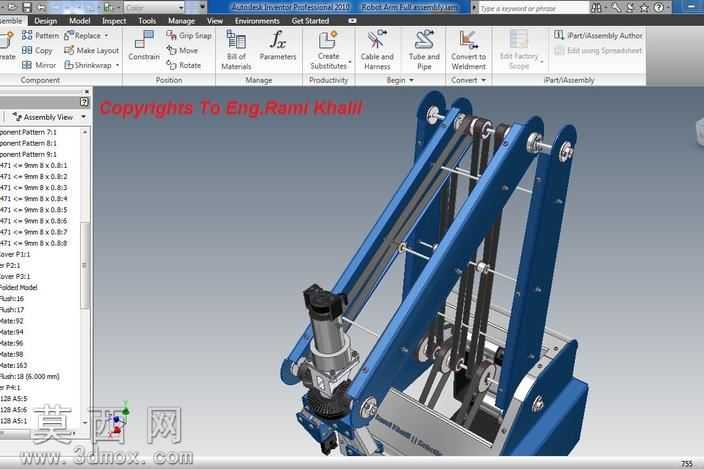
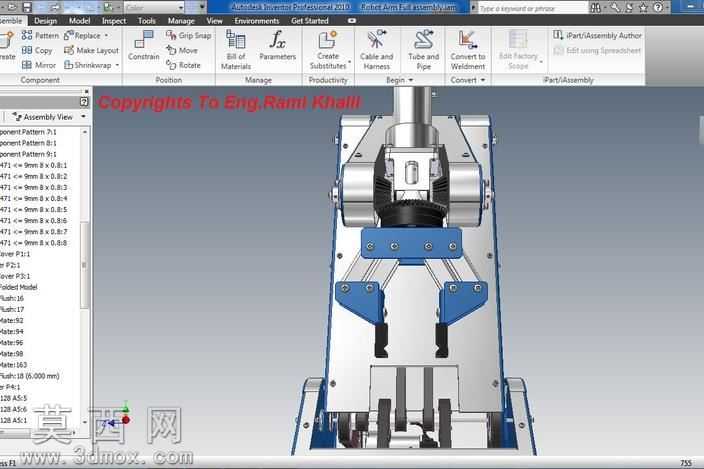


5 轴的工业机器人手臂。机械上,机器人被擅长根据设计问题 ;它取决于同步滑轮和皮带来生成它的运动。此外,它使用电动马达,使用直流电流工作。电机有低数目 (rpm-轮每分钟),自转的方向可以通过喂养极性反向控制。电机带有编码器的有很高的准确性,和他们可以给每个旋转电机轴 (1024) 脉冲,即一个脉冲每个 (0.35) 度的旋转。这个机器人是由表示机器人的第一个轴旋转基地组成,它可以与 (360) 度旋转。手臂,连接基地表示第二个轴的机器人,它可以旋转与唯一 (80) 度。臂,连接到以前的胳膊表示第三个轴的机器人,它可以旋转 (120) 度与。关于执行器结束的机器人,由机械夹持器代表,它所代表的四个和五轴、 它可以旋转围绕两个垂直轴,所以,它使机器人除了三个自由度的两个自由度造成和以前的轴,所以机器人有五个自由度 (DOF)。机器人有六个直流电机,电机的每个轴上。第六届电机用于生成运动为夹持器的两个爪根据"开放"和"关闭"的案例。夹持器机制包括蜗轮驱动的一条虫子,所以蜗杆旋转结果一对旋转的方向相反的两个蜗轮、 夹持器可以打开的最大角度是 (60) 度。执行器结束了左右两个互相垂直的轴的旋转角度可以取得使用三个锥齿轮,两个都是装配到一个轴在相反的方向和第三的锥齿轮装配到另一个轴。运动方法可以解释如下: 当两个相反的锥齿轮在相反的方向时,第三个锥齿轮转过身来它的轴,所以夹持器绕其轴转动。另一方面,当两个相反的锥齿轮在同一方向绕其轴时,第三个锥齿轮不扭转其轴转过来的其他两个齿轮,和夹持器所以转身的两个相反的锥齿轮轴。这种机器人的工作图的空间清除在上面的图片之一。


- 模型大小 :19.49 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :