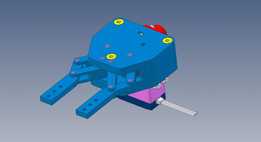
带伺服的机器人并联夹具
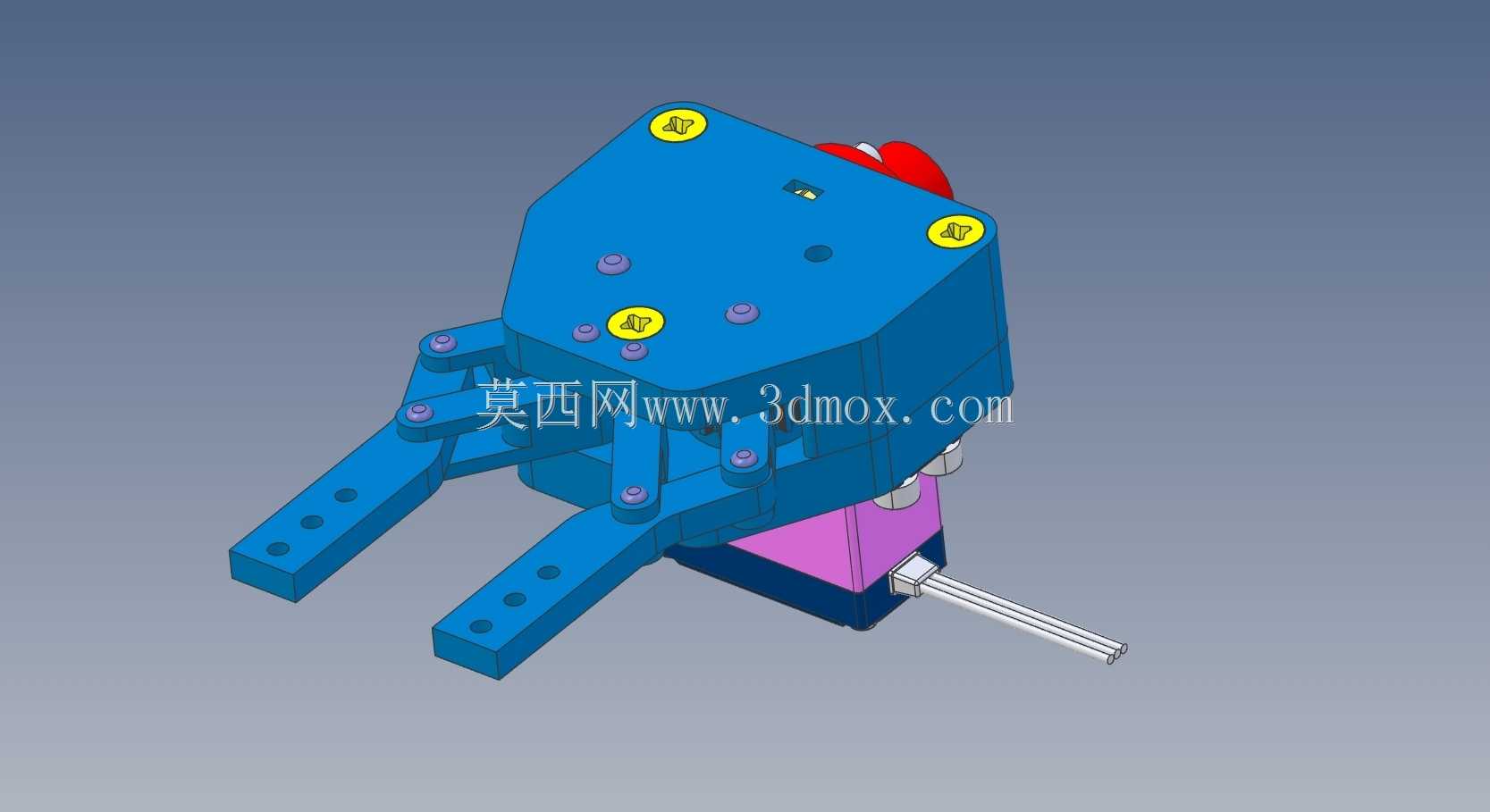

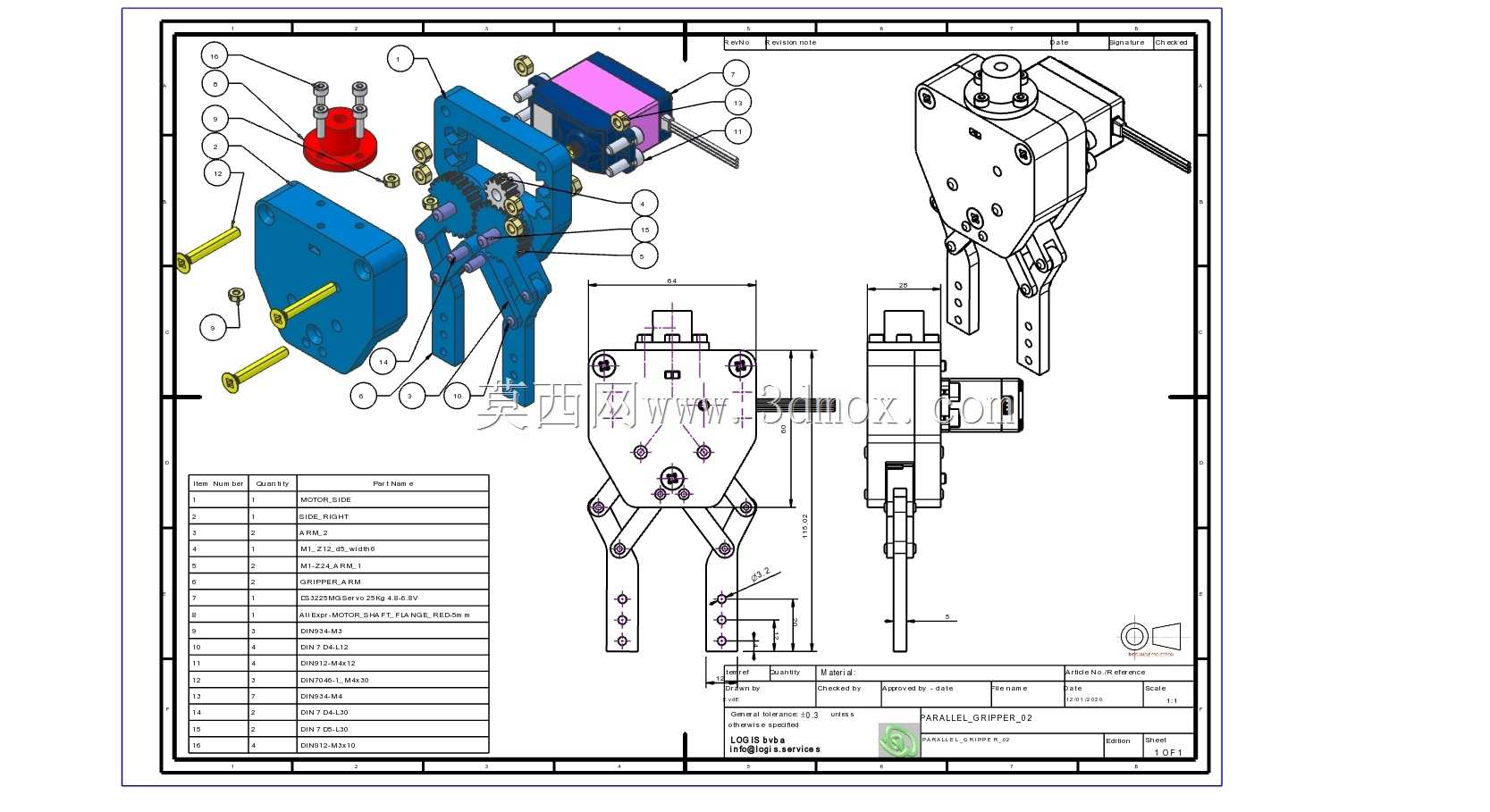

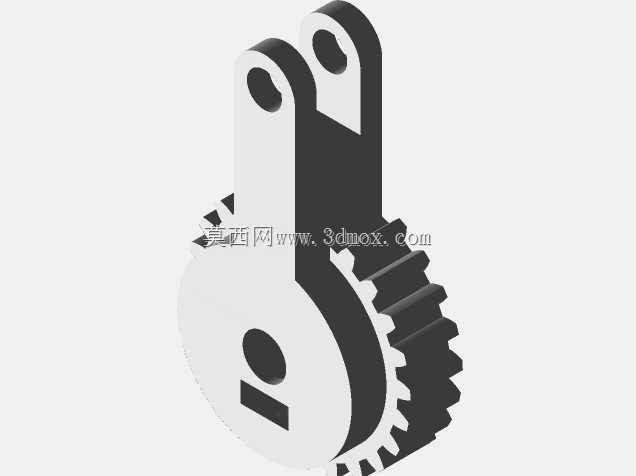

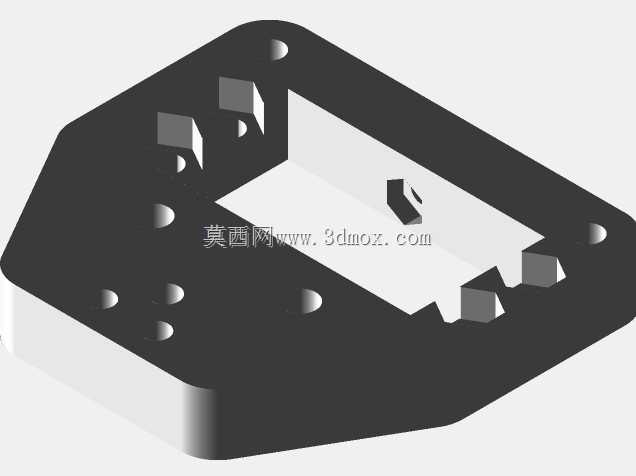
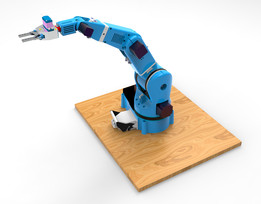
这个机器人手爪是其中之一出版。我的设计规范是:-的使用全金属齿轮伺服-枢轴点为空轴(DIN 7 h7质量)-齿轮比2-连接到我的6轴机械臂-能够接收夹持器力传感器(计划升级)您可以注意到齿轮和平行臂之间留有间隙侧面部件的内部。在装配过程中,我用0.5 mm的IGUS TRIBO-TAPE填充了这个厚度。大多数你看到的设计是在塑料和塑料之间摩擦,不是吗好的。在那里是否包含step文件供您自定义夹持器手臂。为了了解设计,我添加了一个三维pdf文件,以便您操纵装配以及所有零件。只需在acrobat reader中打开此文件,双击图片并接受即可打开3D操纵视图。使用零件树,您可以打开和关闭所需的零件就像。还有包括带分解图和零件清单的pdf


- 模型大小 :10.21 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,STEP / IGES,Rendering,STL,STL,Rendering,STL,Other,Rendering,STL,STL,STL