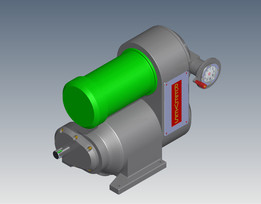
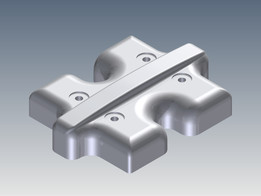
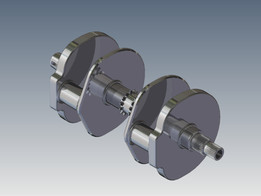
RC罗孚大沽野马



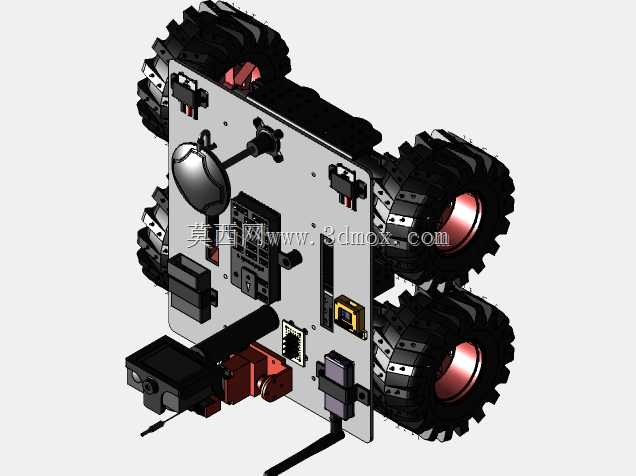
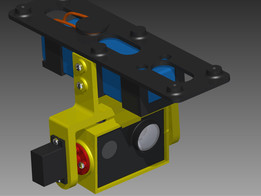
我想我会分享我最近的一个项目。看了几段YouTube视频后,我想造一辆自动漫游车。漫游者是基于一个大沽野生图珀底盘和控制的Ardurover皮克斯霍克控制器。路虎是四轮滑移转向类型和控制与典型的钢筋混凝土发射器(我使用一个简单的Flyski i6)。它也可以运行任务的基础上,全球定位系统的航路点和设置与这种类型的系统。漫游者有一个伺服电机驱动的FPV摄像机系统以及一个动作摄像机。我设计并3d打印了定制平台以及支架电子产品。享受吧!参考grabcad用户“Mechantronics Art”了解基本底盘系统Dagu Wild Thumper 4WD Chassishttps://www.pololu.com/product/1566https://ardupilot.org/rover/docs/getit.html文件


- 模型大小 :26.33 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,Rendering,Other