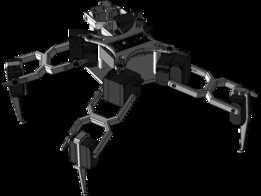
有刷电机上的Quadrocopter









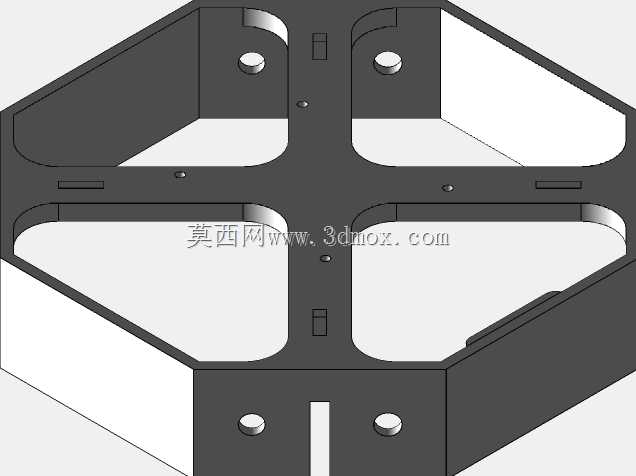
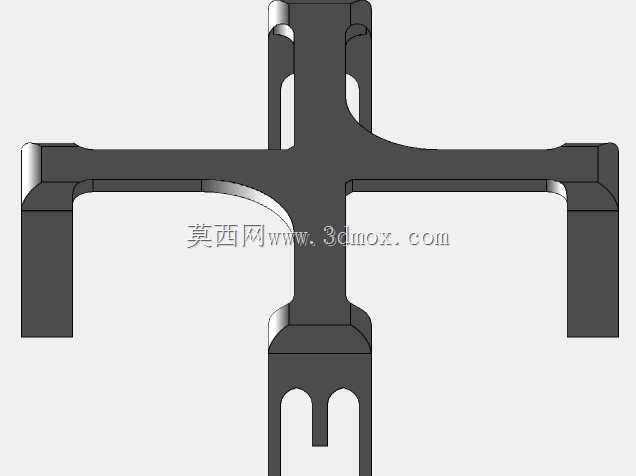



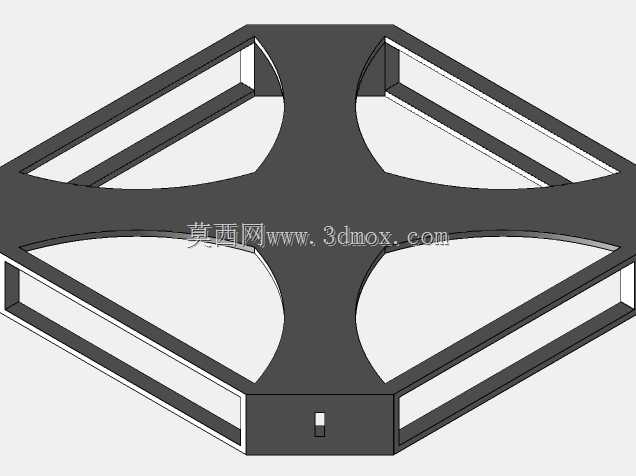
在四旋翼机(JRC h 31)的基础上组装的有刷电机上的四旋翼机。该项目的实质是将飞行控制器板转移到一个新的外壳上,简化设计,并将FPV摄像头添加到设备。是吗使用:1)碳梁-2个。2)jjrc h 31 Quadcopter的飞行控制器3)abs塑料制成的机身。4)4个54齿的大齿轮5)每个电机轴4个齿轮(计算出的模型)6)4个手表用电刷电机。(它们的转速足够JRC h 31四翼机的基本叶片)7)你可以用电池做实验。我用的是400毫安时3.7伏30秒的电池。飞行时间是6分钟


- 模型大小 :8.24 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS