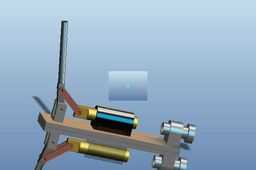
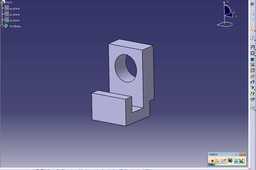
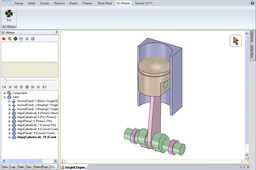
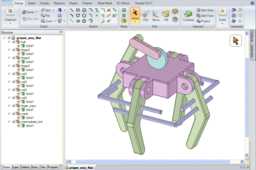
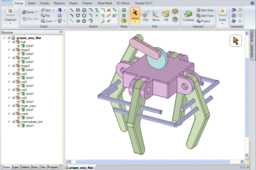
新型单自由度夹持器
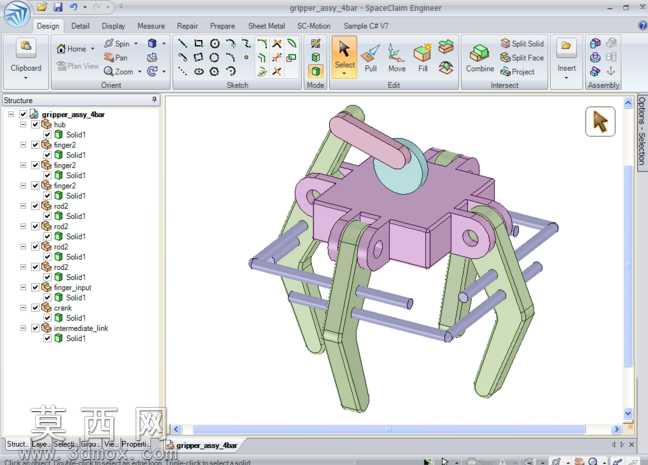
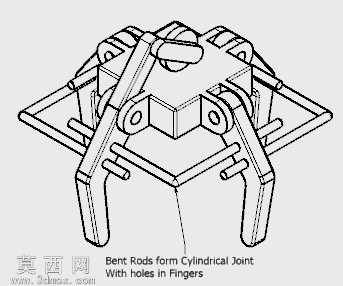
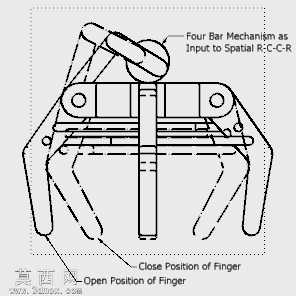

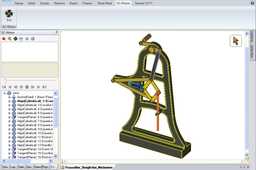
这是设想了一个几年前新型夹持器。它有一个单一的电机在顶部的旋转的四杆机构曲柄。由弯杆连接的手爪的手指。一个循环的基地、 手指、 杆、 手指和基地对应的 R-C-C-R (Revolute-圆-圆柱-机制机制)。我在 http://www.nacomm09.ammindia.org/NaCoMM-2009/nacomm09_final_pap/ASM/ASMRL28.pdf 文件中更多的信息
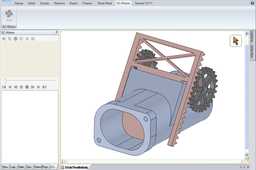
它较早前是在南汽中建模。现在,我已在 SpaceClaim 中导入并对其使用 SC-议案 (http://www.ar-cad.com/sc-motion/index.html) 执行运动仿真


- 模型大小 :4.39 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :