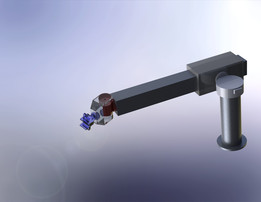
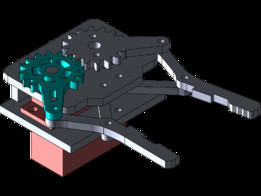
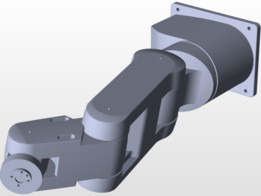
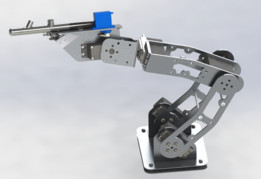
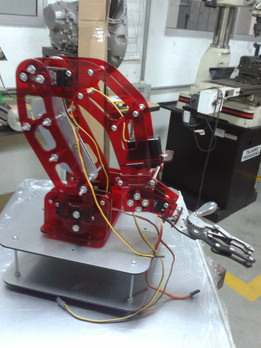
大沽六自由度机械臂


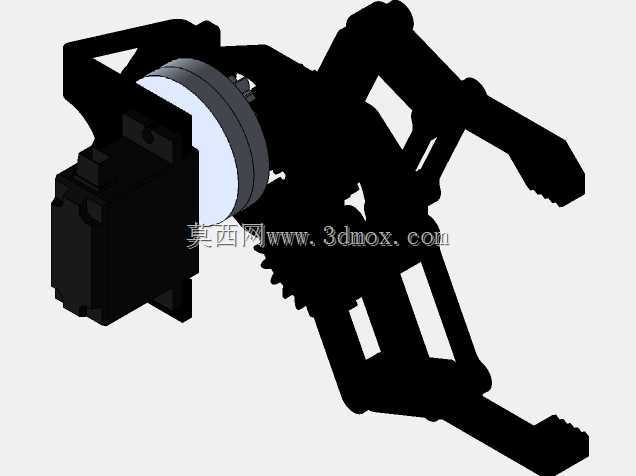

























现有6自由度机械臂的逆向工程模型(5自由度和夹持器)。希望你觉得有用,如果您有任何问题,请随时与我联系问题。好好享受.**标记为初始的伙伴可以取消抑制以使机械臂返回其初始姿势,然后抑制以移动我想要它被用作实际手臂的模拟,使用控制运动的软件(LabVIEW),如视频所示。**更新:一位同事本人(Samer-Elsawy)直接用Matlab建立了模型。他很乐意和我分享他的文档,把它上传到这里给那些可能觉得有用的人。这是一个名为“Matlab和SolidWorks接口”的.pdf文件


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Other,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORK