H-845六足机器人/机器人Stewarts平台

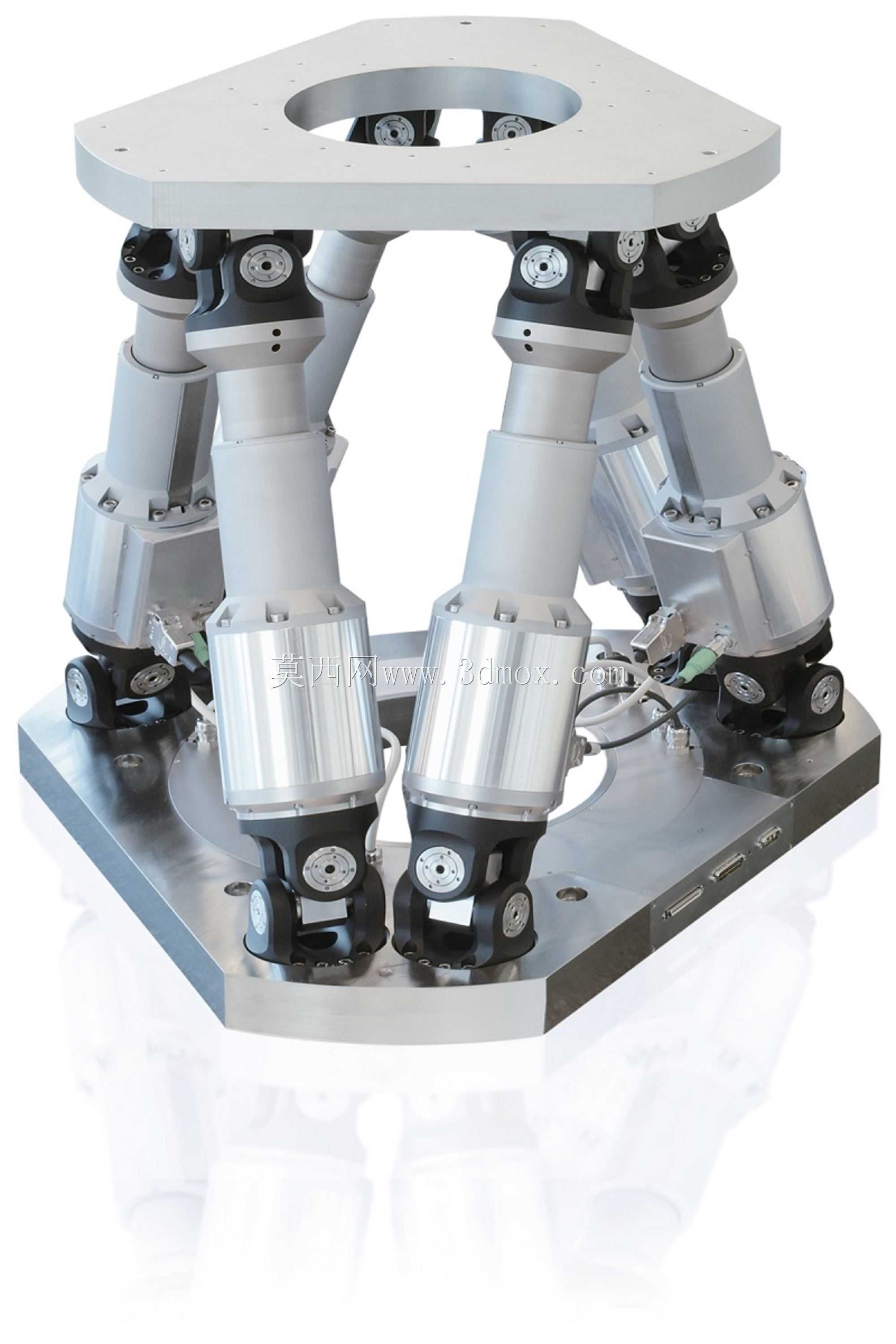
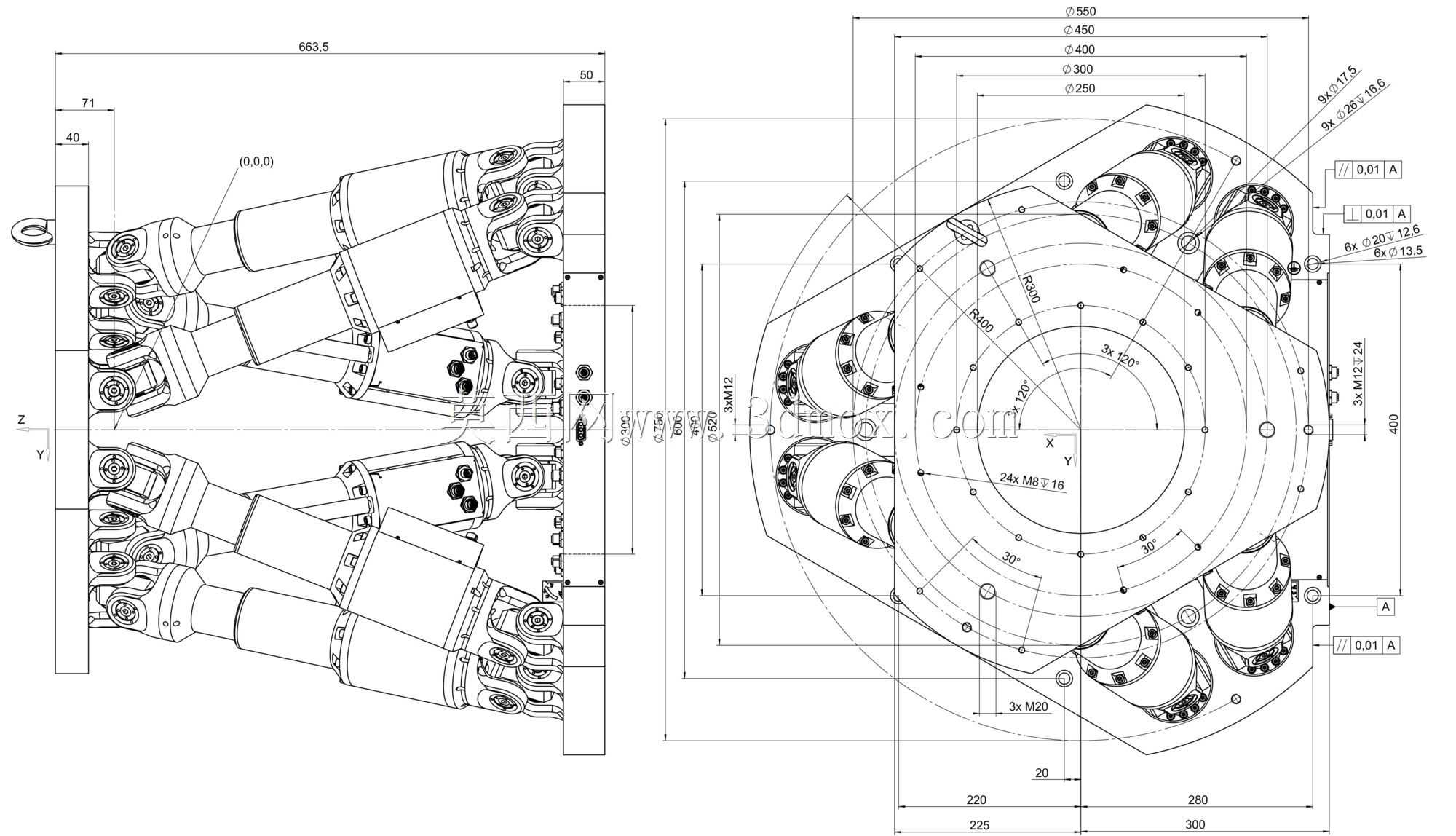
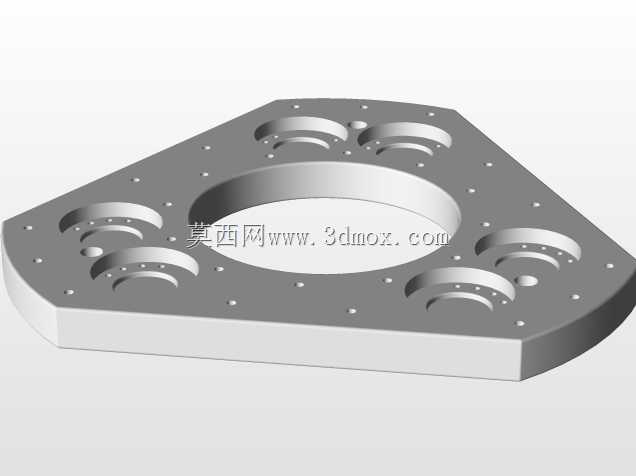


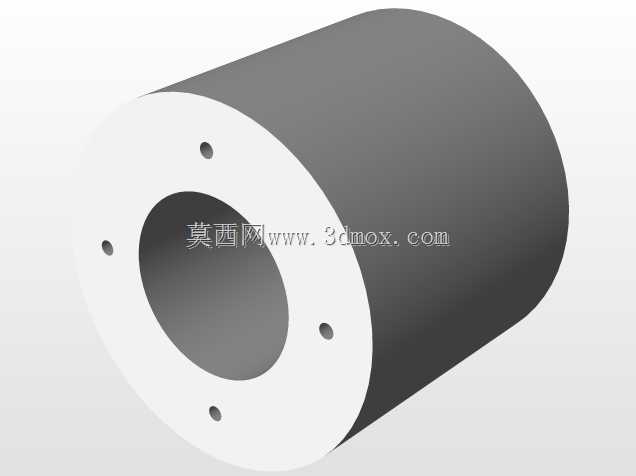
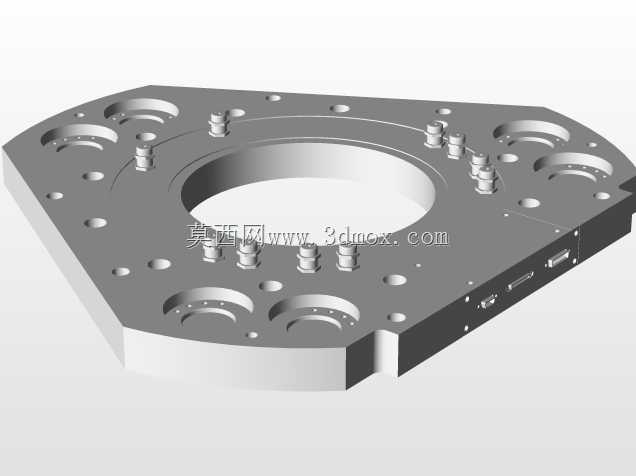

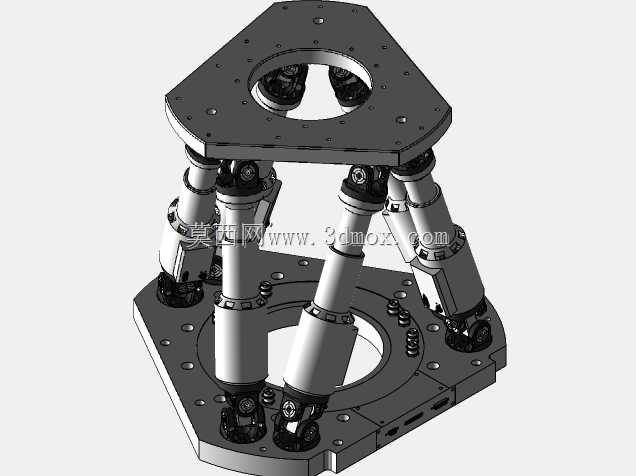






这是一个H-845六足系统从PI解决方案的精确运动和建模定位零件大多是根据给定的系统尺寸从链接:https://www.physikinstrumente.com/en/products/parallel-kinematic-hexapods/hexapods-with-motor-screw-drives/h-845-high-load-hexapod-700805/The这个设计的主要目的是用于个人学习和模拟目的


- 模型大小 :8.3 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,Other,Rendering,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLID