MorpHex地面探测机器人(MGER)MKI



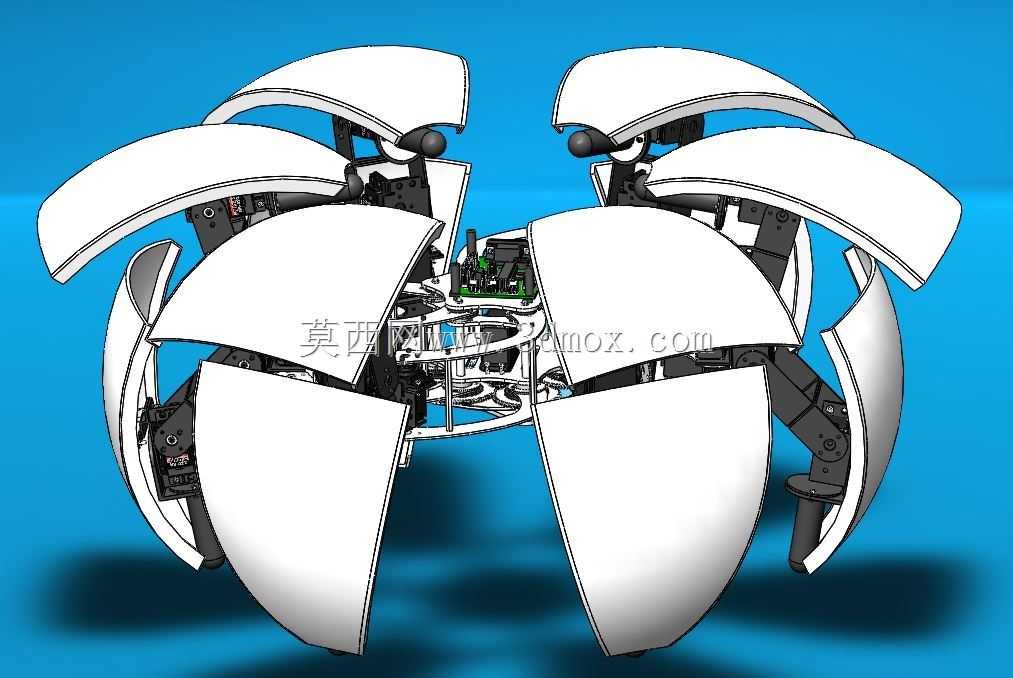


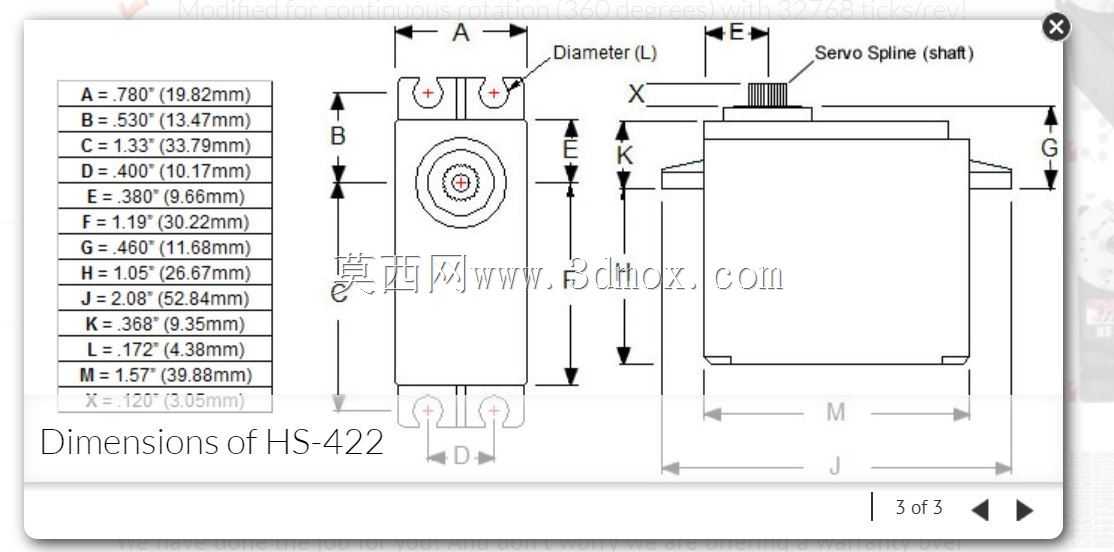



































这是Morphex地面探索机器人MKI(简称mgermki),我发现K?re Halvorsen的Morphex项目鼓舞人心,非常有趣。这个机器人是仿照K?re Halvorsen的一个MorpHex机器人阶段来建模的,可以在下面找到网页:http://www.robotpark.com/academy/designproject/morphex-project-morphing-hexapod-kare-halvorsen-81020/I发现这个机器人是一个有趣的六足动物设计方法。它最吸引人的一个方面是能够从一个六条腿的六足动物转变成一个球体。这为机器人提供了一种不同的交通方式。这种多功能性是一个有趣的挑战,设计和工作和…在一起我的模型的目的是要经历一个全面的机器人设计项目。基于上面网站的图片,我使用了自顶向下的设计方法来开发机器人的定制框架、手臂、盾牌和其他部件。我为机器人的腿建立了现成的山猫运动部件模型,并使用了以下网站上的SSC-32伺服控制器CAD模型来实现电子兼容性用途:http://www.lynxmotion.com/s-5-ses-3d-models.aspx这些如果有人正在寻找开发这种机器人的起点,那么零件可以进行三维打印或制造原型在现实生活中。值得注意的是,对于原型设计,需要找到合适的轴承,以便在机器人上使用武器。未来MGER的版本将包括更密集的屏蔽设计、可扩展性、陀螺仪定向检测、额外的传感器硬件,和一个探测终端效应器手臂。我的这个项目的下一步是尝试使用模拟软件,也许是ROS中的Gazebo,来开发机器人运动的控制(转换操作和传感器集成)。谢谢,我希望你们都喜欢我的模型!迈克尔・孟


- 模型大小 :28.37 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Other,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,Other,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,