

PTD执行机构,Arduino驱动




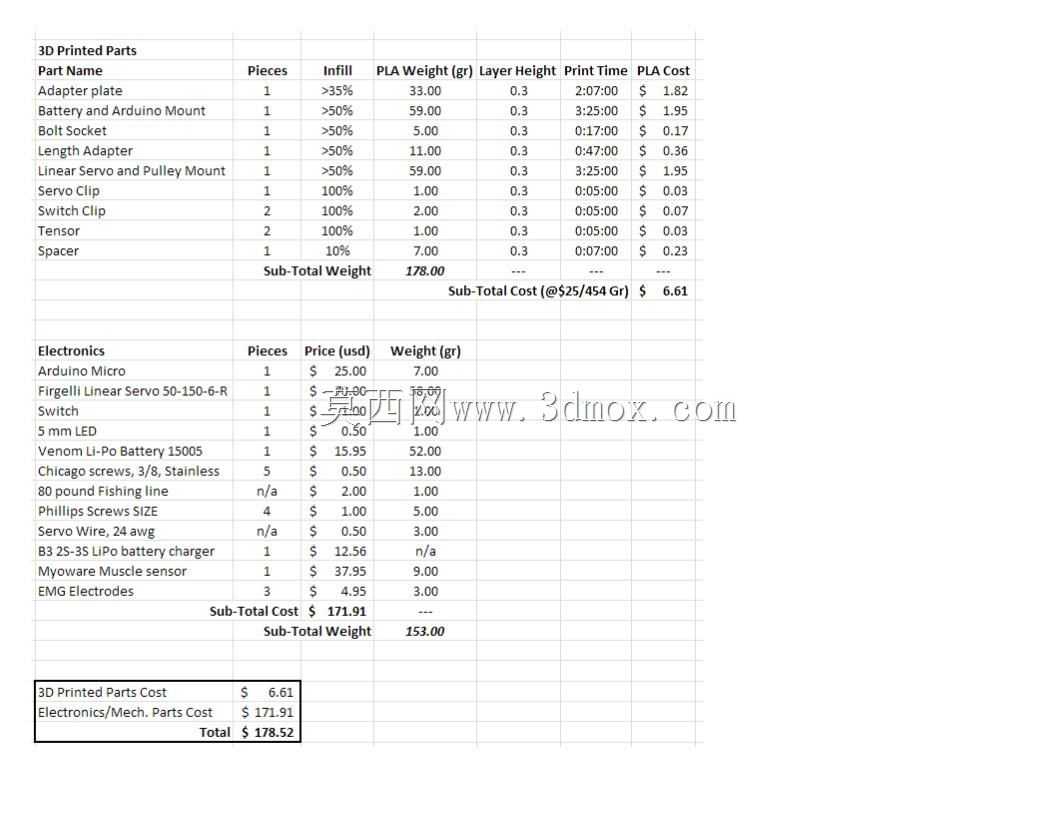




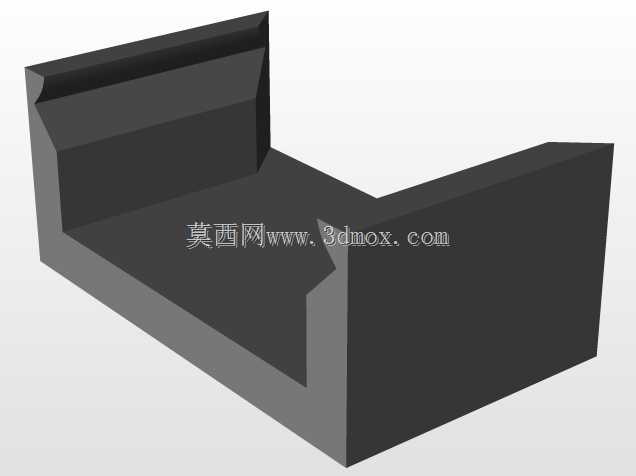
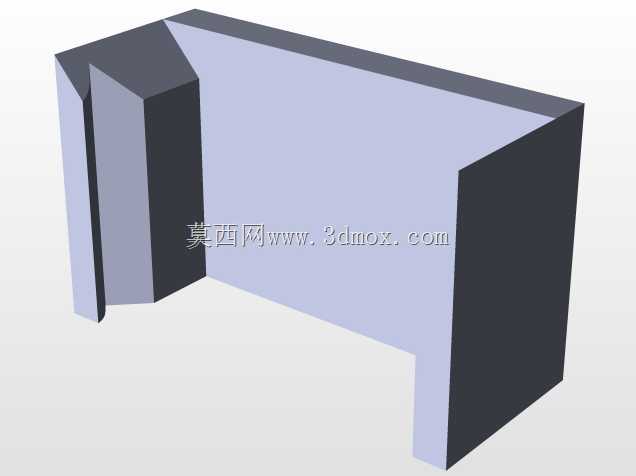
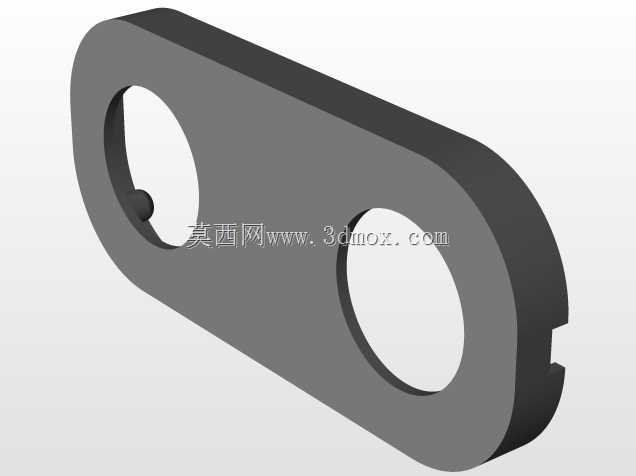
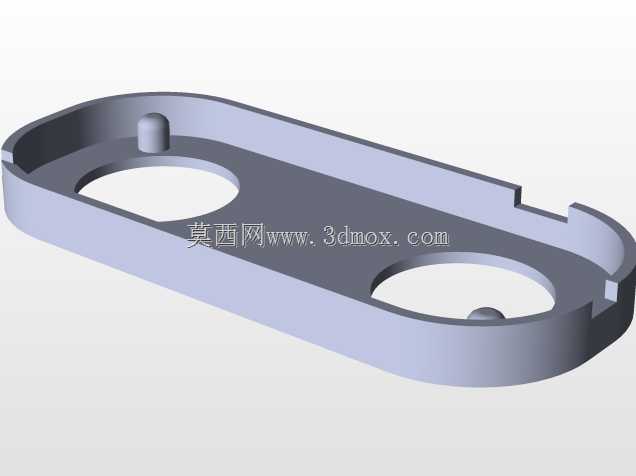
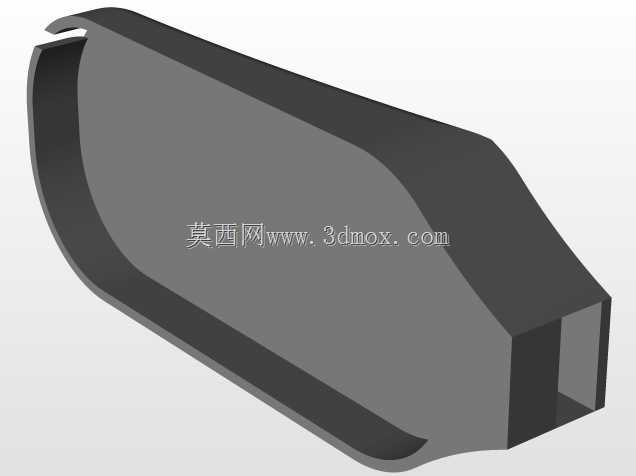
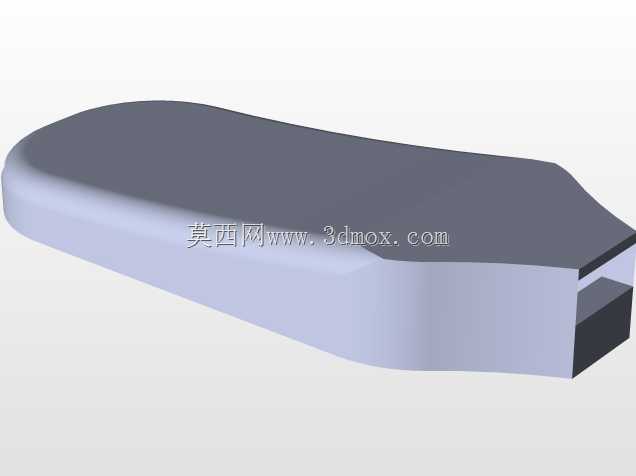
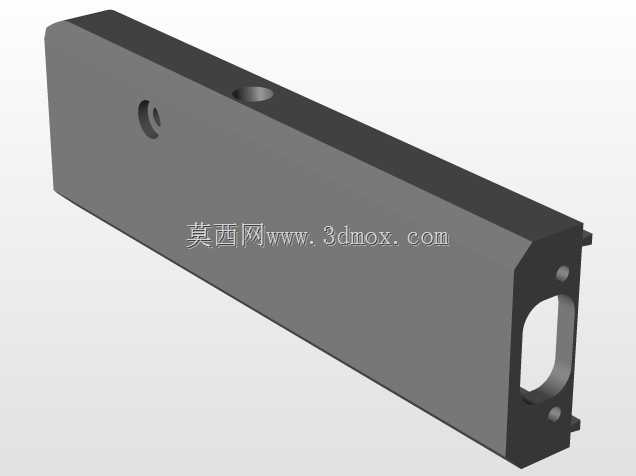
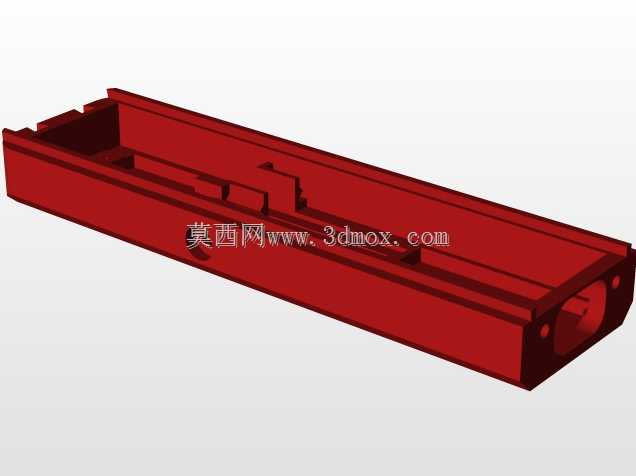





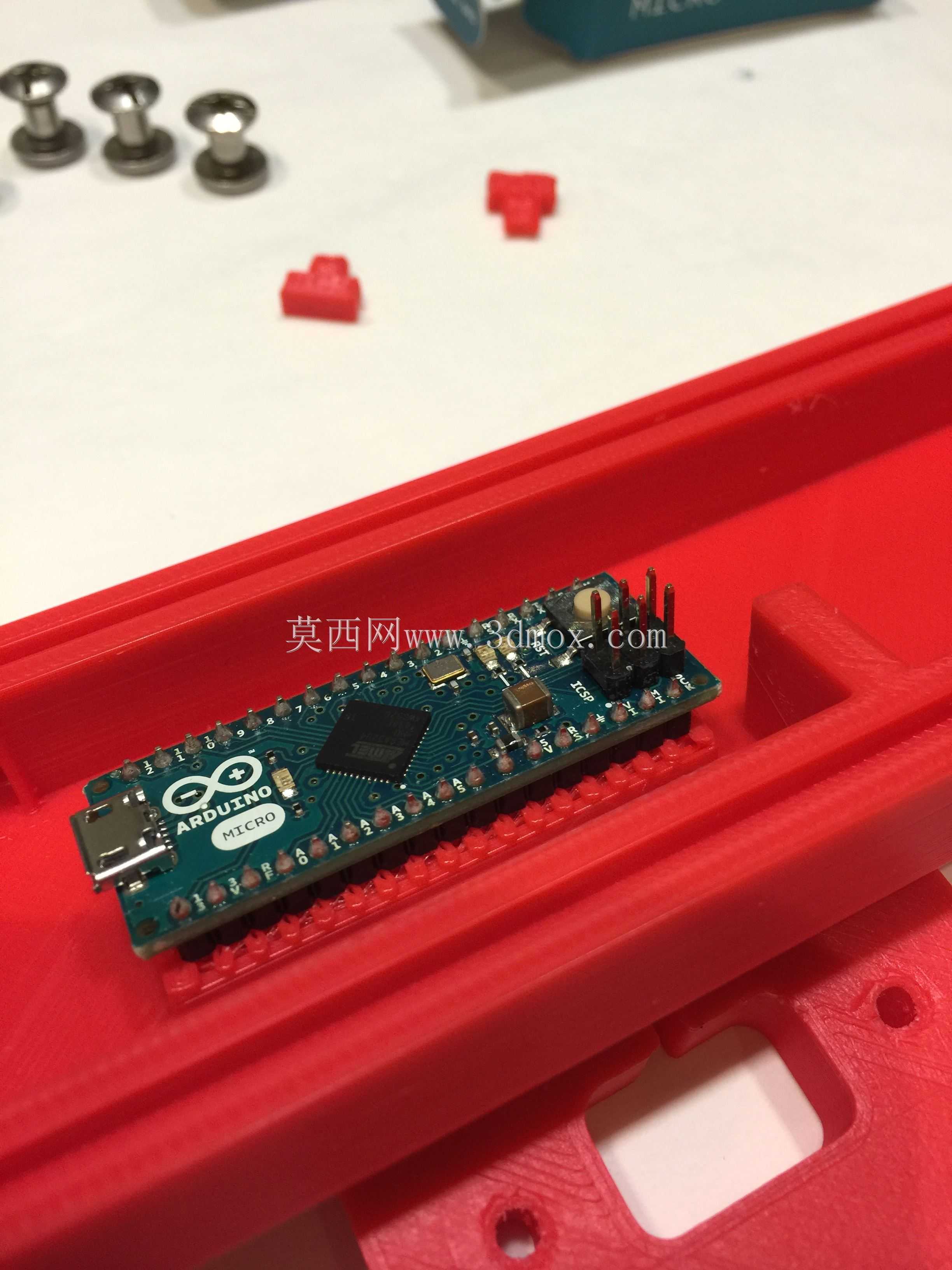



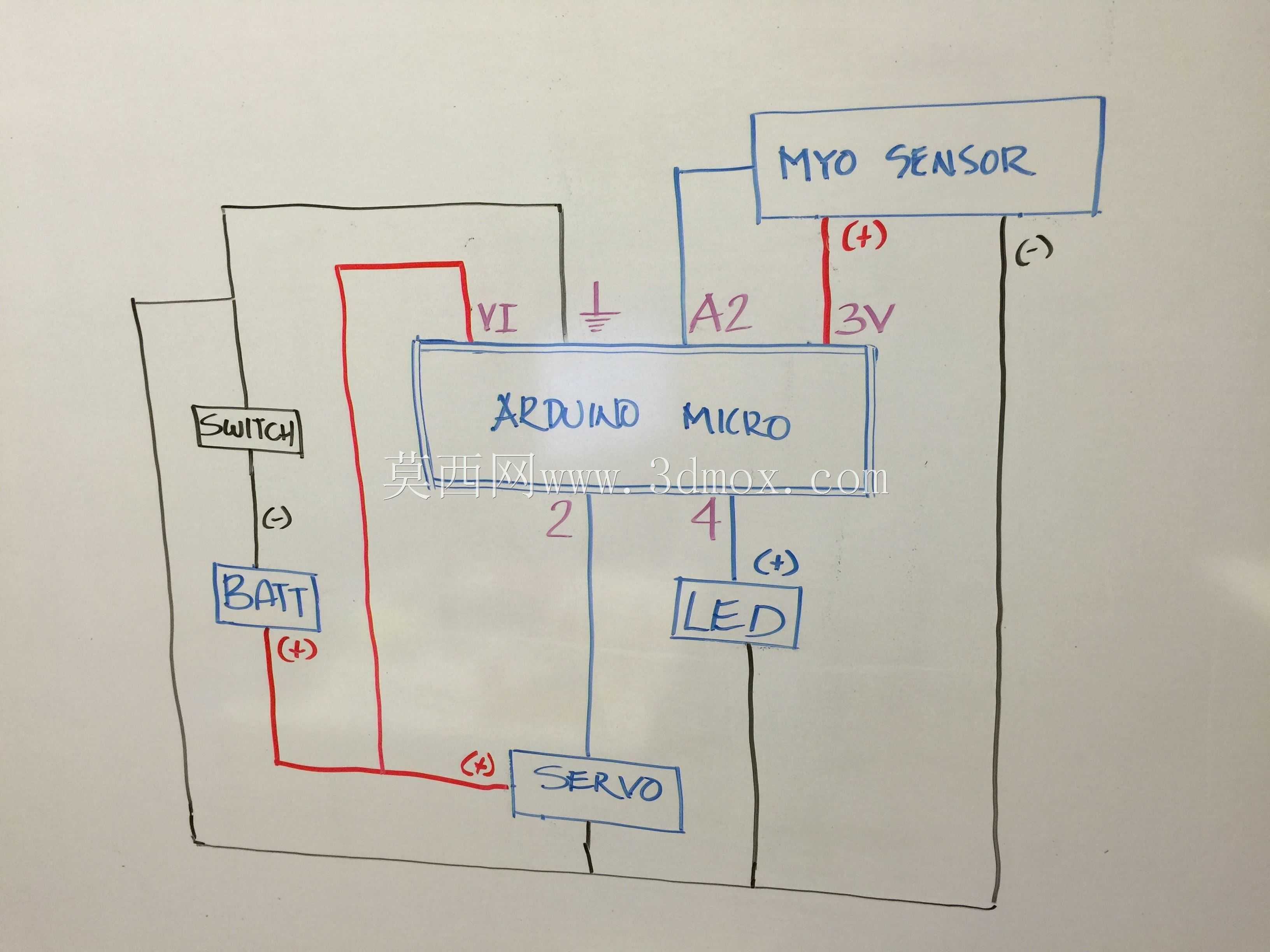

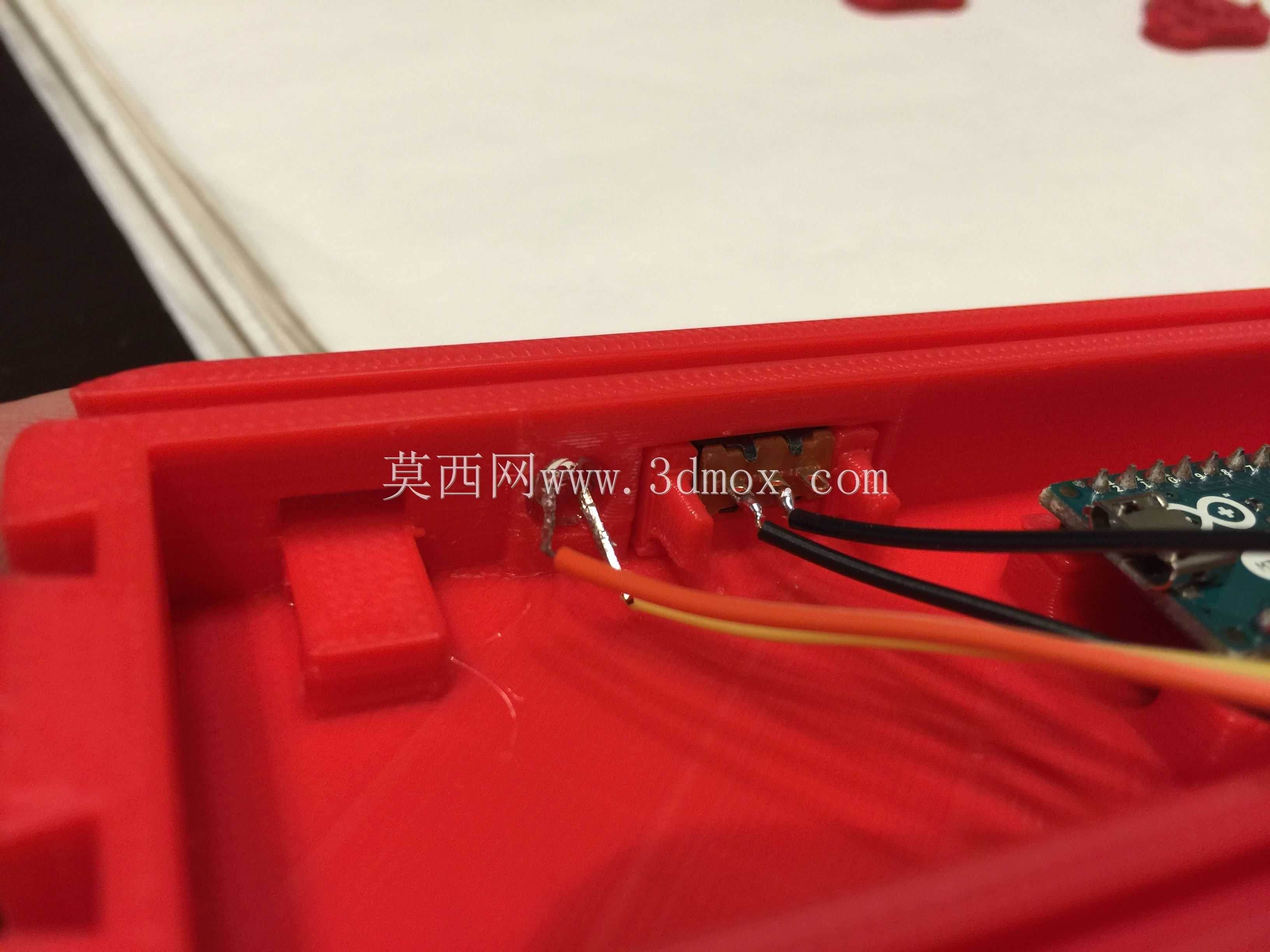

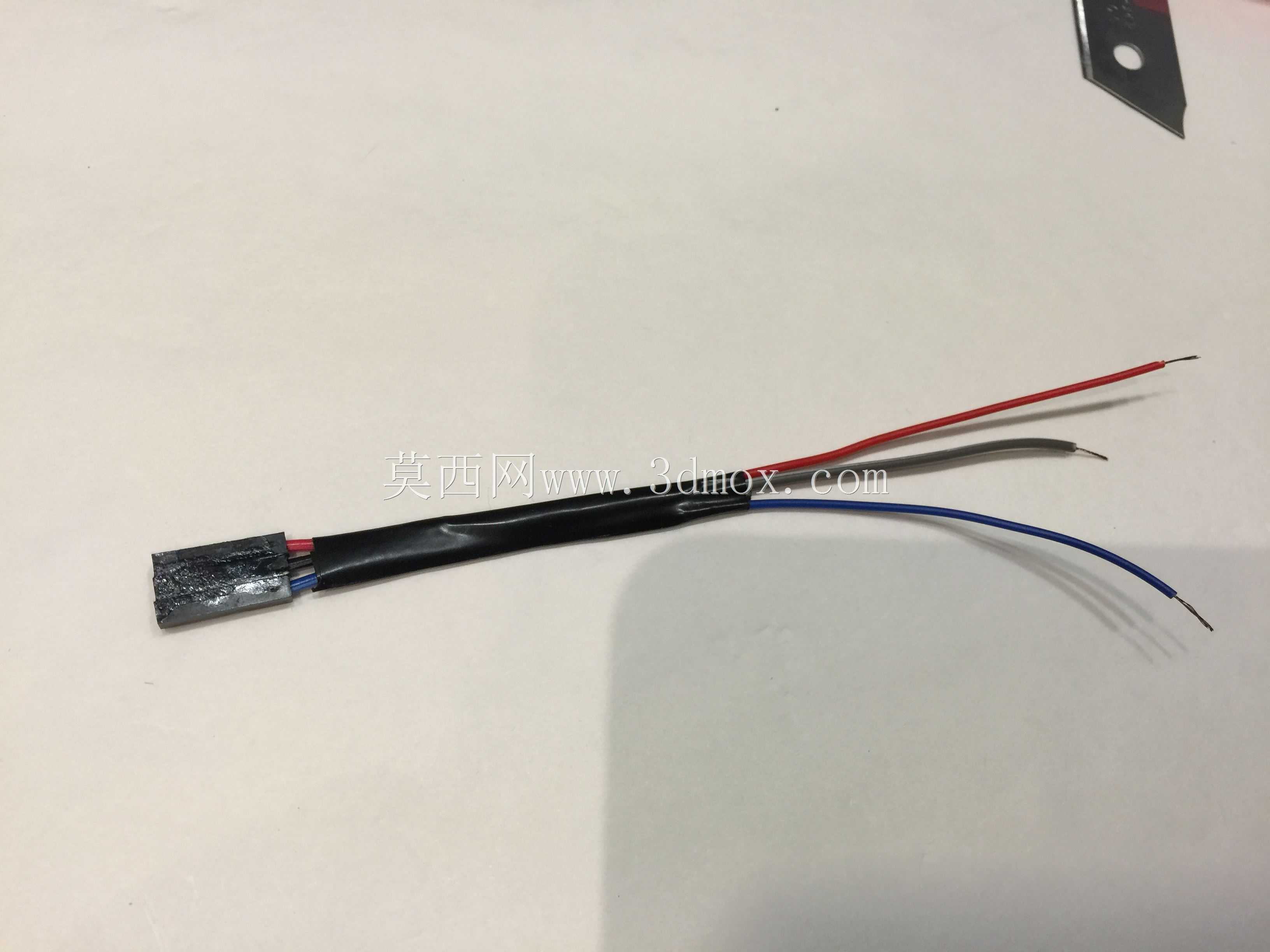



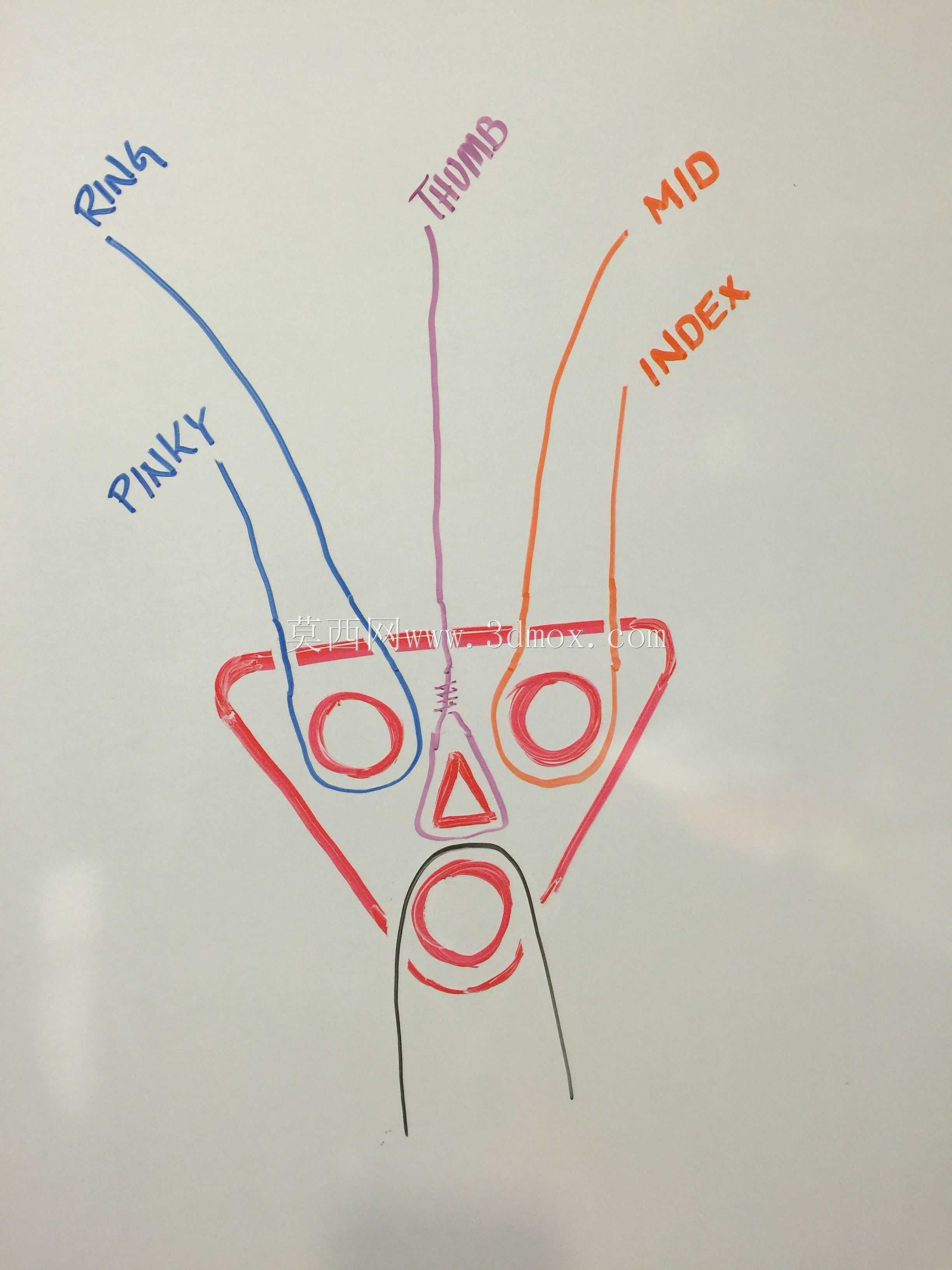








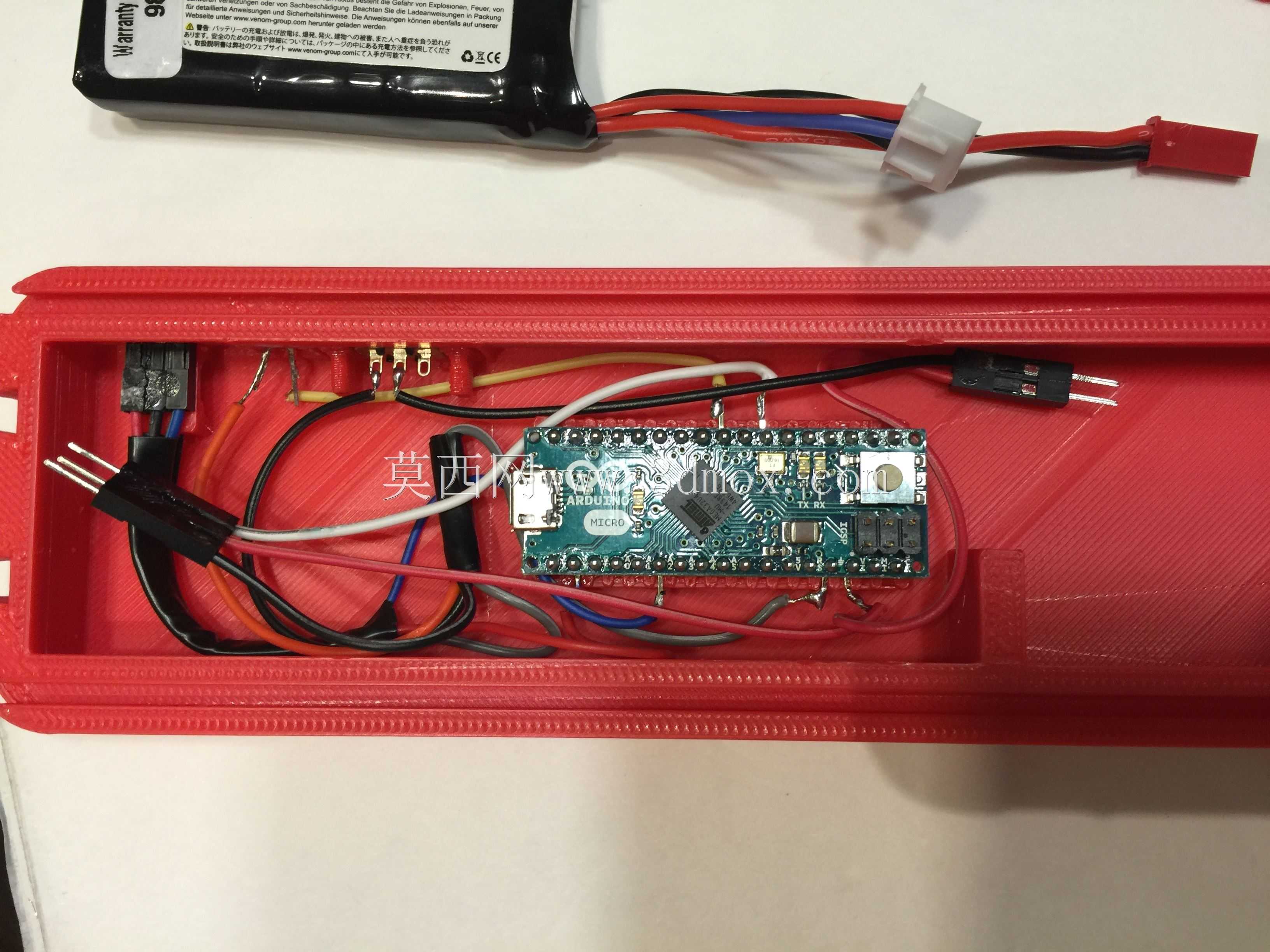


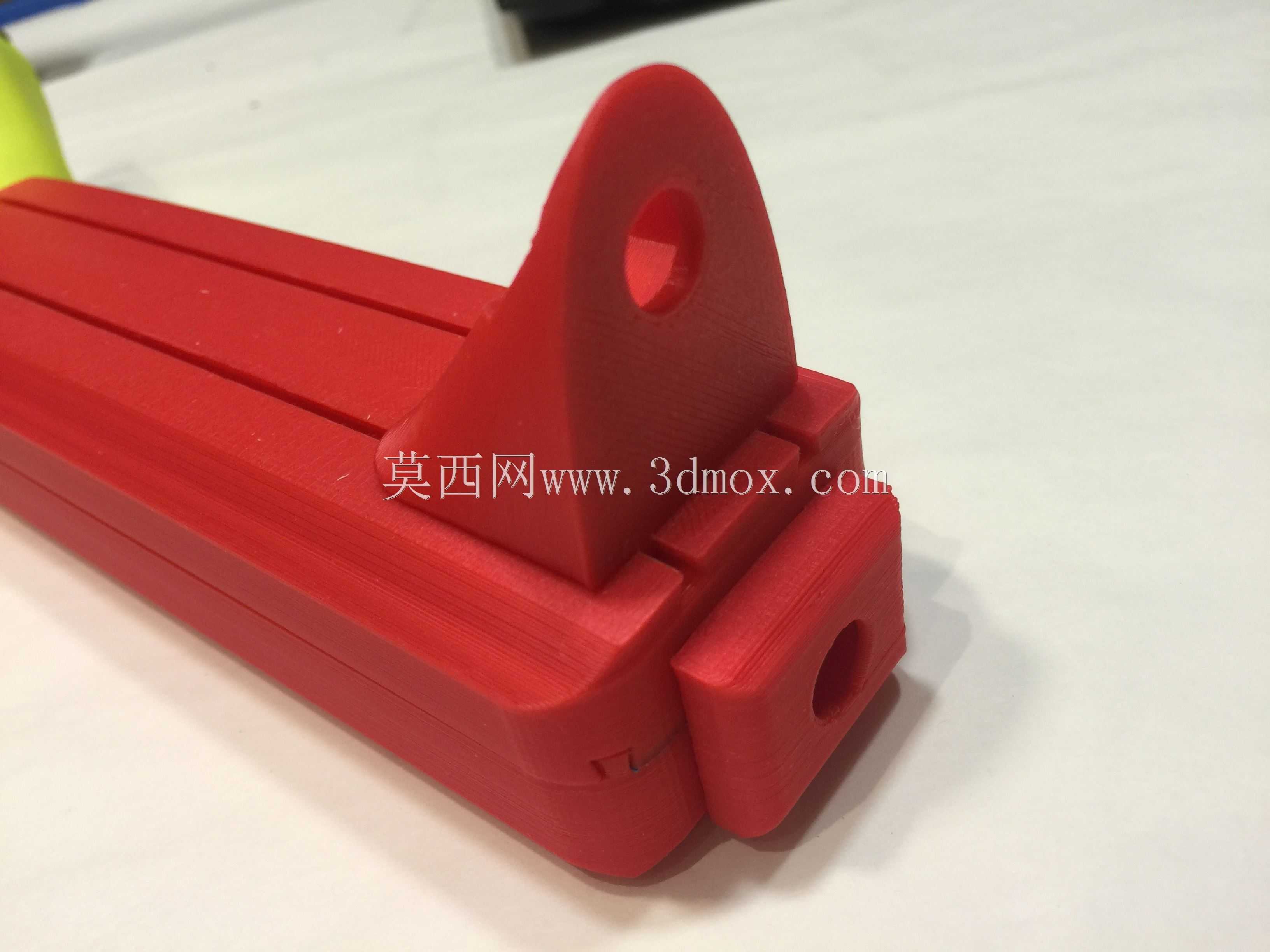




您好,我会尽量使这个描述尽可能简短,但请随时问任何问题,你可能有。什么时候我看到了eNABLE所做的事情,并开始阅读社区成员在设计、打印和组装任何变体的假手时所面临的问题,我发现了一些几乎所有案例都会遇到的问题,于是我决定开始研究一种方法,尝试更好地解决这些问题可以。所以呢我首先确定了比例/尺寸问题;当印刷的手涉及螺丝或螺栓和其他标准尺寸的硬件时,要适当地扩展到一个自定义的收件人,这将变得非常困难大小。那么它的机械部分;我见过的所有系统,都是用接受者前臂/手腕上的力量来打开/关闭它。(V/O,V/C)这有很多缺点,因为每个接受者都是不同的,一种似乎对某些人有用的设计,对其他人可能不起作用(不同的弯曲和伸展),它施加的强度也相应地不同,但总是在前臂/手腕规定的某些值内(不要太强)本身。我们3D打印机也会受到限制,无法精确打印较小的特征,而且随着特征变小,塑料本身的机械性能也会受到限制。同样关于规模/大小,还有关于经桡骨截肢的事情,上面(手腕驱动)没有申请。除此之外,一次控制单个手指似乎非常不利,因为在大多数情况下,所有手指共享一个共同的支点,这反过来又使得抓取非圆柱形物体,很难,如果不是的话不可能。所以呢我开始研究这些主题,并设计了这个我在这里向大家展示的作品。我设计了一个外壳,在这里,事情发生的机械方面,不需要缩放,可以与任何类型的三维打印手(PTC)交互,消除了各种硬件的问题尺寸。还有, 我设计了一个滑轮系统,它可以使驱动伺服产生的功成倍增加,同时还有一个滑轮系统,它允许手指在某种程度上独立移动,使手指能够更自由地抓住圆锥形物体或其他非圆柱形物体。如果在肘部和手腕之间有足够的空间,这种外壳可以轴向(共线)安装在接受者的残肢上,也可以通过一对适配器安装在残肢的下面。(这部分还在进行中,但我认为当前的版本工作得很好)所有的东西都是设计成三维打印的,没有任何支持,使任何人在没有太多知识/技能的情况下更容易组装需要。也是我试着去除尽可能多的材料,这样它就可以轻,但作为强大的有可能。好吧3D打印部件的重量为178磅gr最重的部分是电池和线性伺服控制系统移动。移动运动由Arduino Micro驱动微控制器,读取值从一个Myoware传感器放在肱二头肌肌肉群。Arduino启动伺服,通过一个倍增滑轮和一个张量系统移动手指,允许手指之间的独立运动手指。那里这是我写的一个Arduino草图(代码/程序),每次打开系统时都会校准传感器,因此,如果Myoware传感器的读数因其在接受者手臂上的位置不同而不同,系统会适应这是最难的组装时,这个系统的一部分是需要焊接,就是这样,非常简单。我试着使它尽可能简单、轻、高效、便宜和坚固。我用的是195c印刷的红色PLA,3毫米的层数,不同百分比的填充物,全部印在Makerbot replicator2上,用一只灵活的手(由Gyrobot)来演示我设计的工作原理。显然,这种设计可以并将与任何通过拉线(钢筋束)驱动(V/O,V/C)的PTD设计一起使用。您将在随附的文件中找到材料的完整列表及其建议的打印设置和特性,以及所涉及的Arduino代码和装配。均匀当挑战是一个PTD与几个技术要求,我的设计不完全符合所有这些,我认为这是一个伟大的时间和机会来分享这项工作,我相信可以非常有帮助(主要是在概念上,但也在执行)。我真的希望这是有助于社区。谢谢为了阅读,请随时评论/询问我设计。乔斯埃桑托斯Lizcano.update更新:忘记包括arduino代码,抱歉。现在可以下载了
- 上一篇:铁人奥卡设计实验室
- 下一篇:RockShox Vivid R2C 2011年

- 全部评论(0)

- 模型大小 :60.19 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,STL,Other,Rendering,STL,SOLIDWORKS,STL,SOLIDWORKS,Rendering,STL,SOLIDWORKS,Rendering,SOLIDWORKS,Rendering,Renderin

















