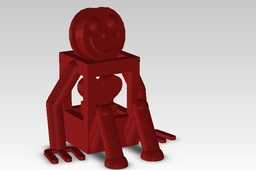
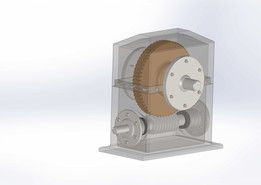
机器人手








这是我的版本的机械手,5轴使用MG995马达。
我使用了用户获取CAD3D模型
伺服机器人手臂
,改变了我的需求,和改变一些稀释。
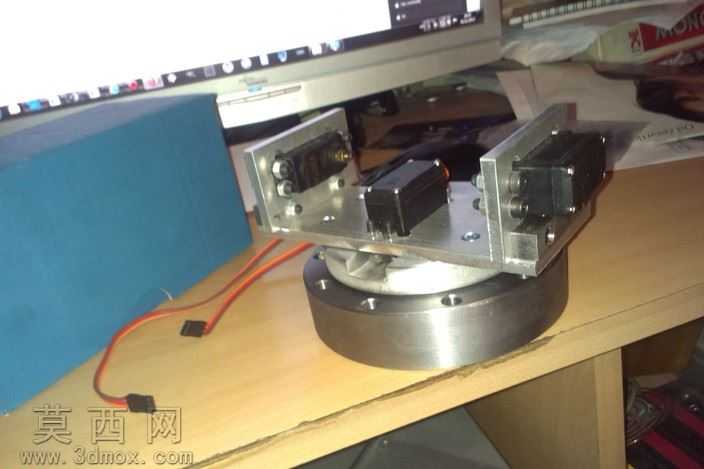
我仍然在开发五轴的我想要轻松互换用钳子或简单的主轴附件(是的,我将尝试使用数控代码程序:))
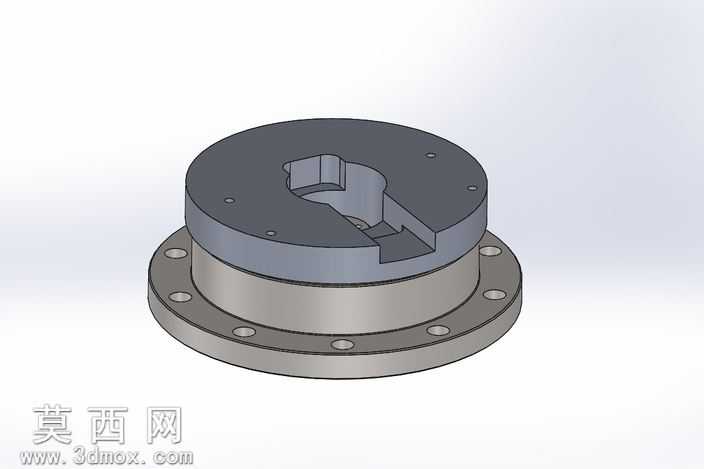
它是6毫米宽度铝做的,,我真的希望MG995应对体重……
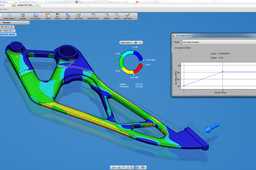
(是的我很懒做计算,我还在学习阶段的solid-works运动分析……
很多非常感谢用户J E巴斯贡献这个3D模型。
p。 最大的错误,我做了,做了一些头挠失踪的电缆在原始MG9953D模型,所以我建模的时候没有注意如何组装在一边的平方槽。 但最终,我谎报电机螺栓(4)和重组它一边的洞:)


- 模型大小 :32.17 MB
- 消 耗 :10莫西点
- 下载次数 :
- 包含文件 :