÷’ľęńŅĪÍĽķ∆ų»ň-14147łŖ—Ļ…≥∑ĘŌ„Ĺ∂
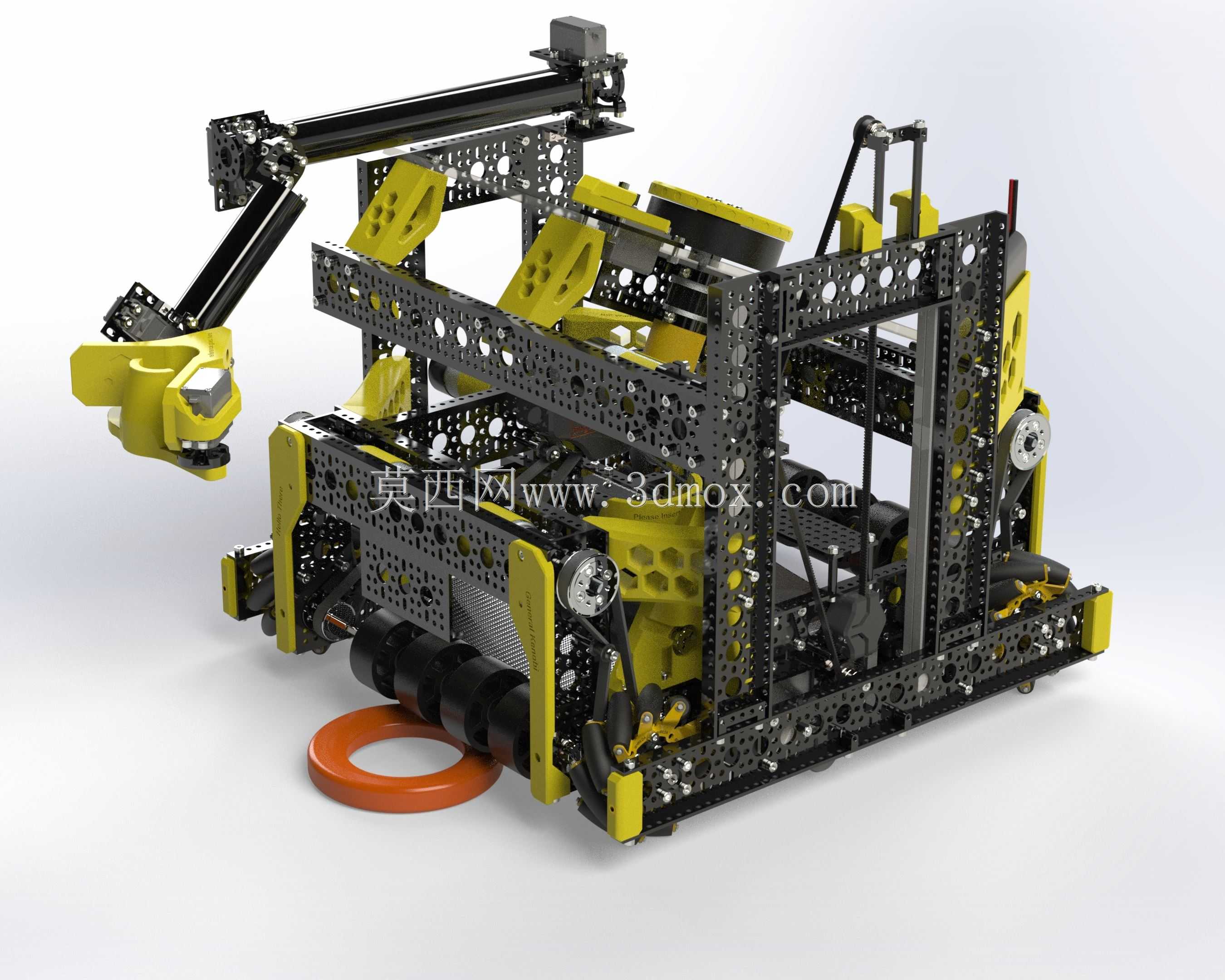

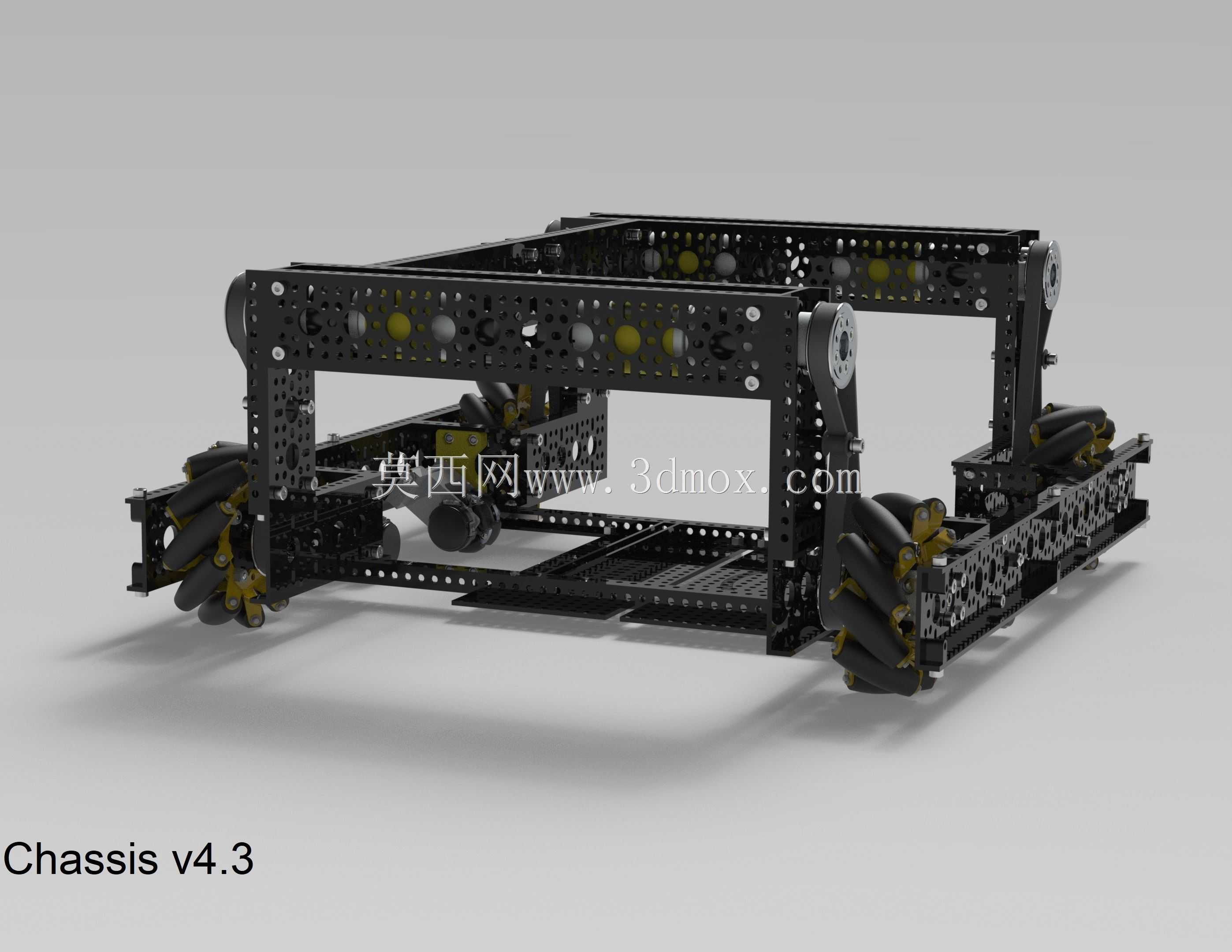
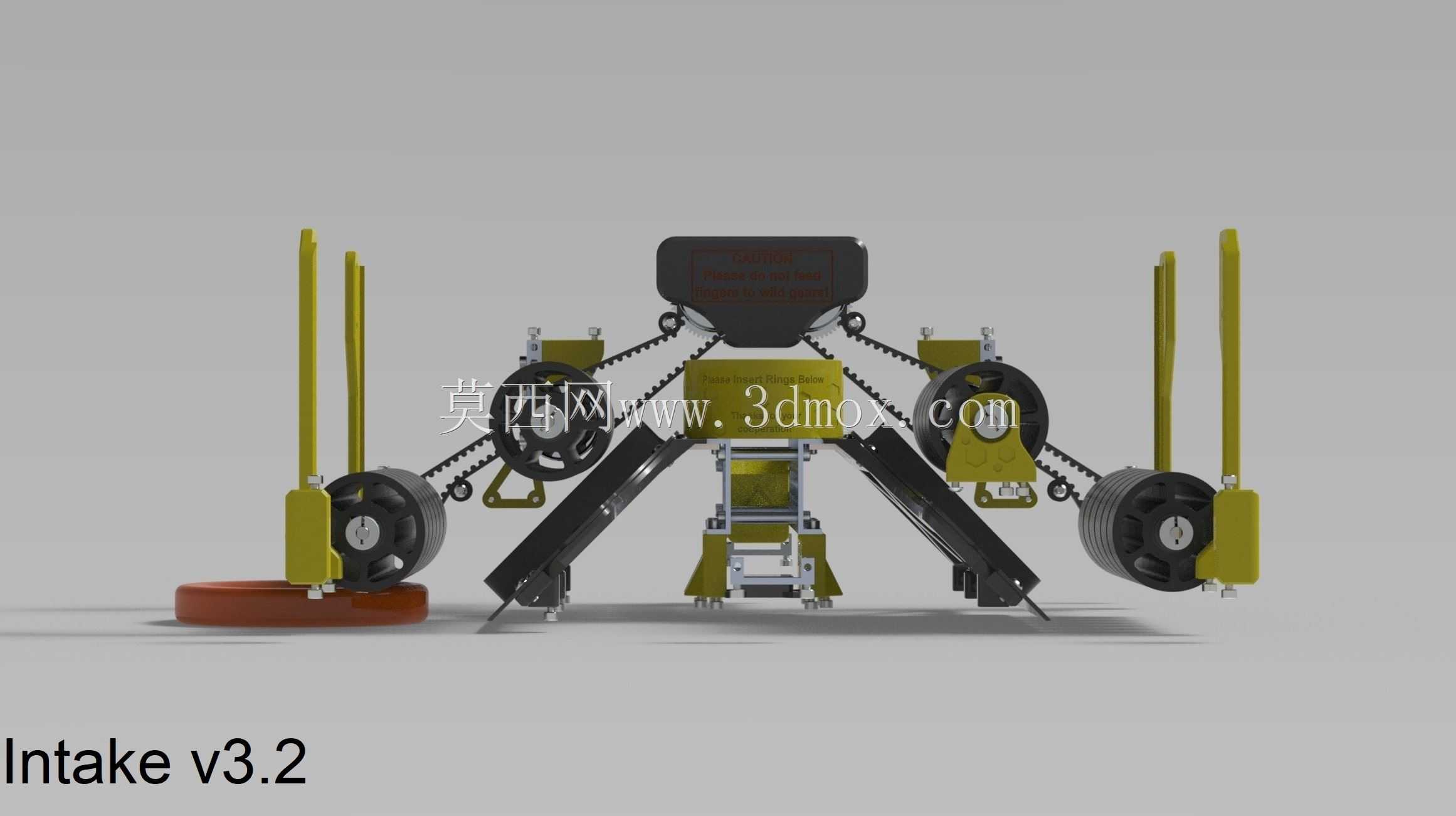

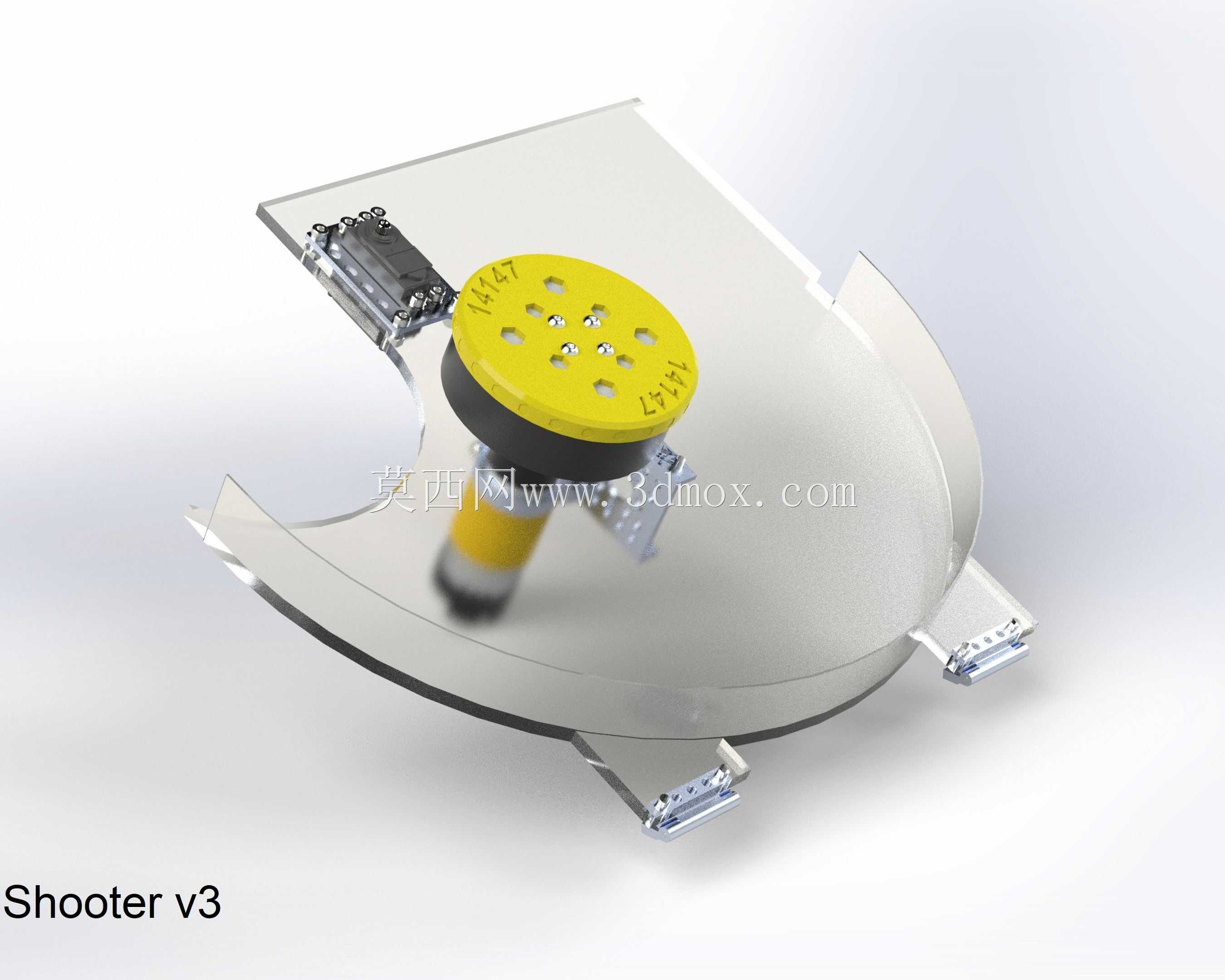
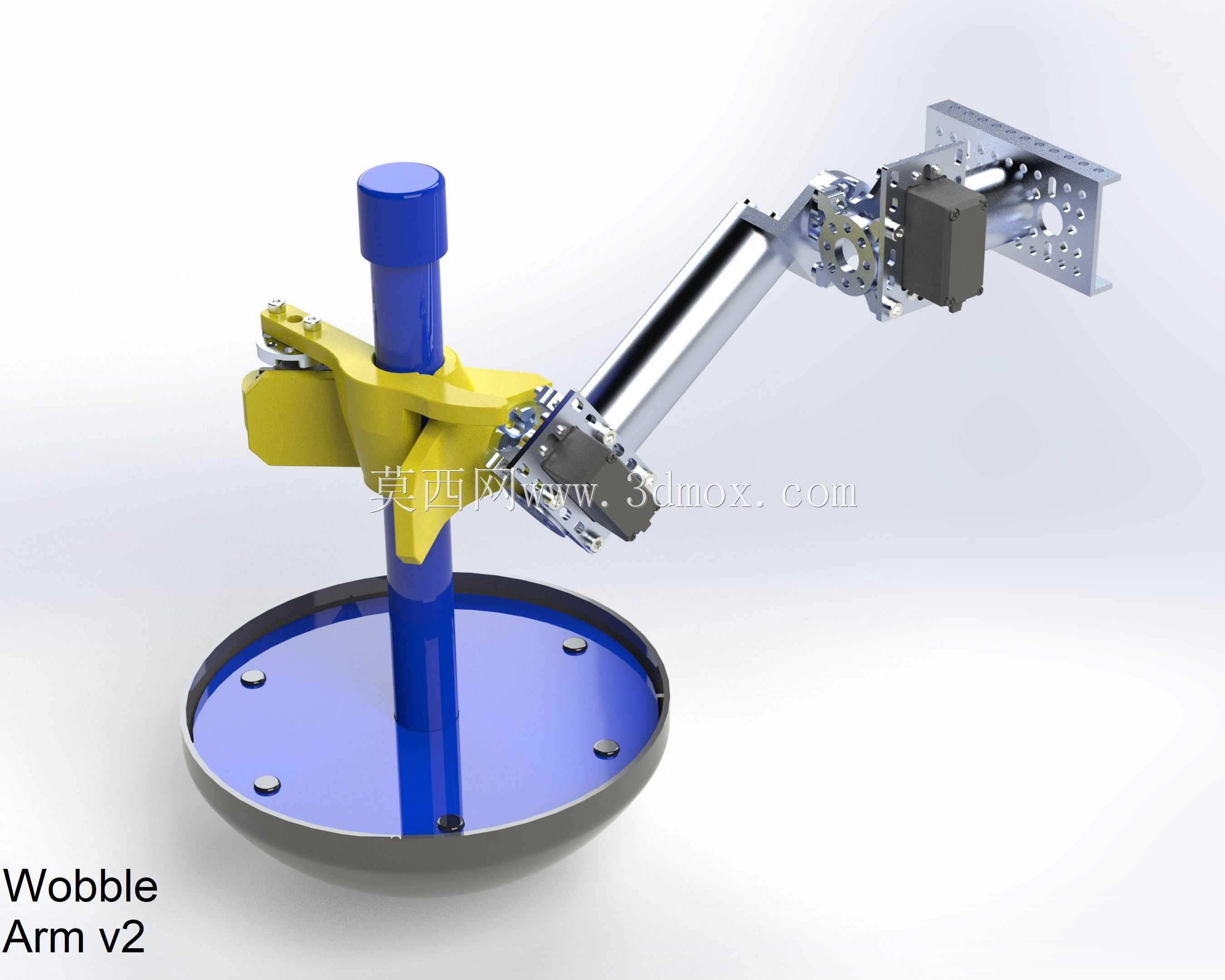
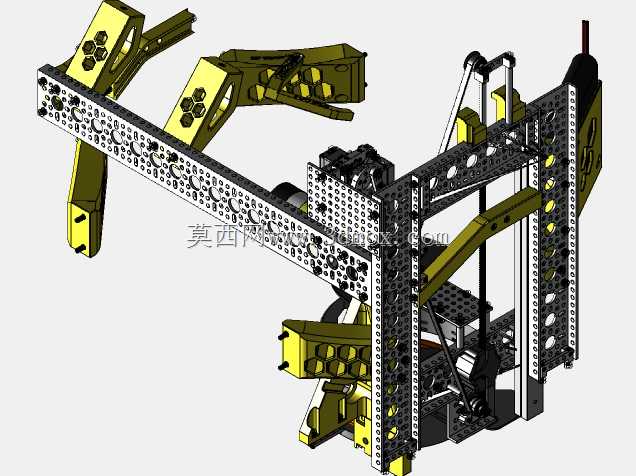
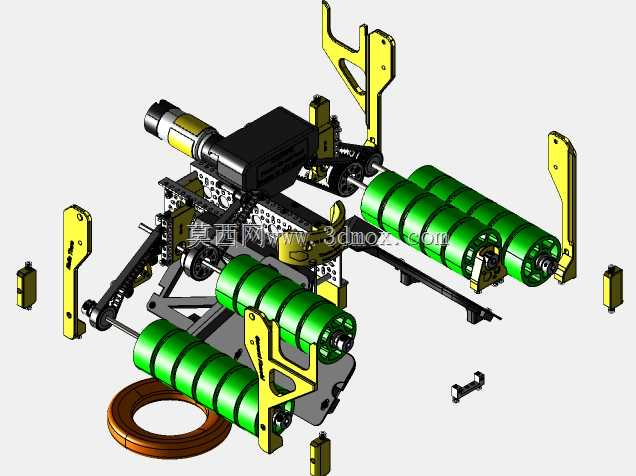

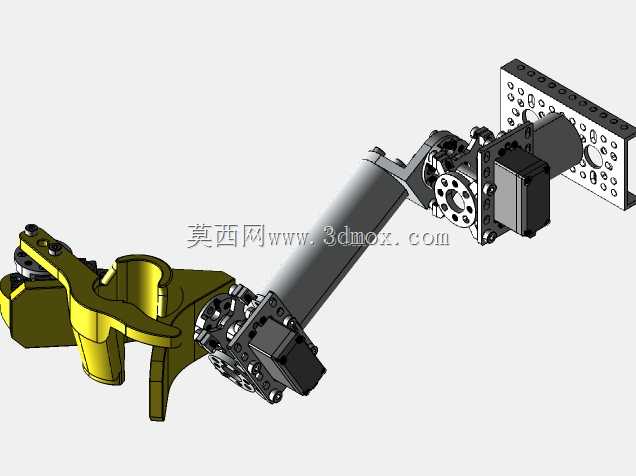
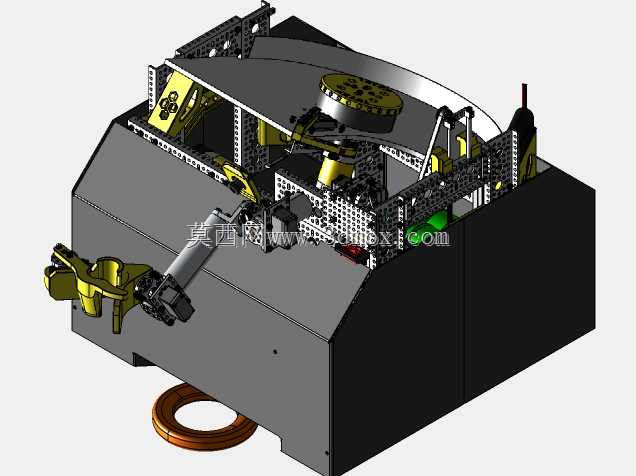
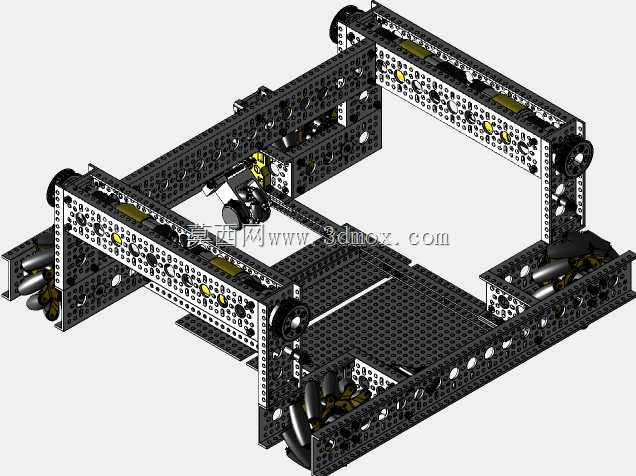
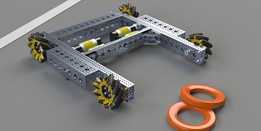
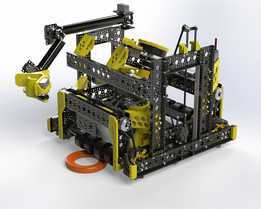
ńķļ√£¨’‚ «14147ÕŇ∂”ĶńĽķ∆ų»ň2020-2021Ķń◊Ó÷’ńŅĪÍ°£’‚łŲĽķ∆ų»ň”–őŚłŲ÷ų“™Ķń∑÷◊‹≥…£¨Ķ◊ŇŐ£¨ĹÝ∆ÝŅŕ£¨…żĹĶĽķ£¨…š ÷ļÕįŕĪŘ°£√ŅłŲ◊”◊ťľĢ∂ľ”–◊‘ľļĶńĽ√Ķ∆∆¨ļÕľÚ∂ŐĶń√Ť Ų£¨≤ĽĻż£¨ő“ĹęŐŠĻ©“Ľ–©ľľ űŌłĹŕhere.Chassis£ļ>£Ľ”…19.2:1£®312RPM£©ĶÁĽķ«ż∂Į>£Ľňņ÷ŠĽķ–Ķ≥Ķ¬÷>£ĽWizards.exe ņÔ≥Őľ∆≤•ŅÕŇń…„£ļ>£ĽňęĹÝ∆ÝŅŕ£¨“‚ő∂◊ŇňŁŅ…“‘ī”Ľķ∆ų»ňĶń«į≤ŅļÕļů≤Ņ į»°Ĺš÷ł°£>£Ľ”…13.7:1£®435RPM£©ĶÁĽķ«ż∂Į°£>£Ľ Ļ”√Andrymark 2.25°įľś»›≥Ķ¬÷ļÕVexPro 0.5°ĪŃýĹ«÷Ń6mm DŅ◊adapters.Elevator£ļ>£Ľ”…13.7:1£®435RPM£©ĶÁĽķ«ż∂Į°£>£ĽĶÁŐ›”…GT2Ņō÷∆belt.Shooter£ļ>£Ľ∑…¬÷”…1:1£®6000RPM£©ĶÁĽķ«ż∂Į°£>£Ľ∑…¬÷ «“ĽłŲ96ļŃ√◊łÍĪ»∂ŻīÔĪŕĽĘ¬÷”Ž“ĽłŲ120≥›Ķń»żĹ«≥›¬÷inertia.Wobble ÷ĪŘ£ļ>£Ľ Ļ”√»żłŲłÍĪ»∂ŻīÔҧĺōňŇ∑ĢĻōĹŕmovement.Expect ‘ŕĹ”Ō¬ņīĶńľłŐžņÔŅīĶĹ’‚łŲń£–ÕĶńłŁ–¬°£ĶĪ»Ľ£¨“—ĺ≠ŐŠĻ©Ńňňý”–STEPőńľĢ°£»ÁĻŻńķ”–»őļőő Ő‚£¨«Žňś Ī∑ĘĪŪ∆ņ¬Ř£¨DM meĽÚ‘ŕFTC discord…Ō’“ĶĹő“£¨@Mason | 14147 with love£¨High Voltage
- …Ō“Ľ∆™£ļ¬ř∂ŻīÔń»°§Ķ¬√∑»Ý
- Ō¬“Ľ∆™£ļ¬ř∂ŻīÔń…

- »ę≤Ņ∆ņ¬Ř£®0£©

- ń£–Õīů–° £ļ1 GB
- ŌŻ ļń £ļ5ń™őųĶ„
- Ō¬‘ōīő ż £ļ
- įŁļ¨őńľĢ £ļSTEP / IGES,Rendering,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES