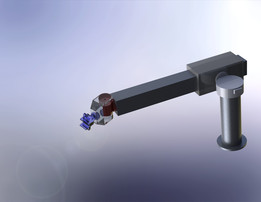
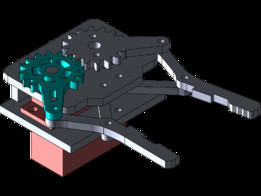
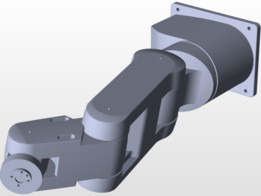
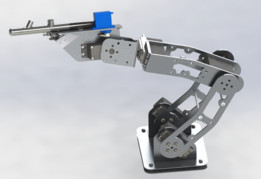
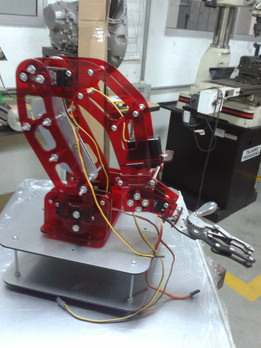
黑格尔项目的机械臂

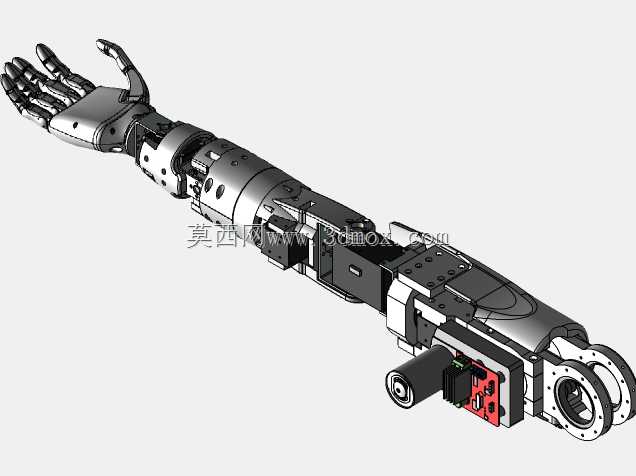


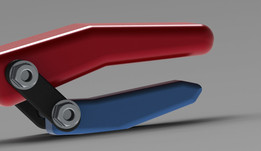
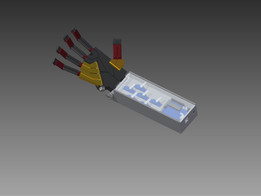
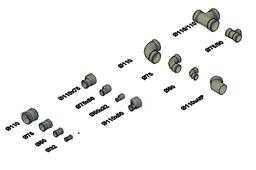
我们想介绍一个教育黑格尔项目。在这里与所有关键问题和材料有关的拟人机器人装配将出版,包括主控制程序。在这个框架内,计划设计两个版本的包层,即公包层和母包层。机器人框架由标准激光切割型材、拐角和板材制成。包层和机械元件在3D打印机上制造。将有两种机械可用:一种是成本较低的简单模拟伺服,另一种是成本较高的数字伺服。本节专门介绍采用数字伺服设计的机器人手臂。该设备需要:?6个轴承52x40x7(W 61808)?3个轴承13x4x5(624 ZZ)?1个伺服Feetech SM85CL?1个伺服Feetech RS485串行总线伺服?4个伺服Feetech SM40BL?1个伺服Feetech SCS40这些可以从制造商处购买https://www.feetechrc.com/ 或在网站上订购http://www.AliExpress-shop.com. 机械夹或档案文件中的打印臂都可以用作机械臂。https://aliexpress.ru/item/32823030052.html?spm=a2g0o.productlist.0.0.31444a68pkXqUm&算法=2d654aad-9874-4254-9adb-d6f092ceb2b8&;算法表达式=2d654aad-9874-4254-9adb-d6f092ceb2b8-9&;btsid=0B8B03416151255220885075E7C6F&;ws\u ab\u test=searchweb0\u 0、searchweb201602、searchweb201603\;库存单位标识=64883722008


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering