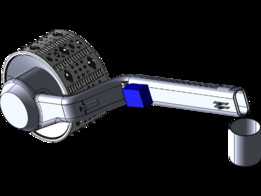
月球车轮风化层取样系统
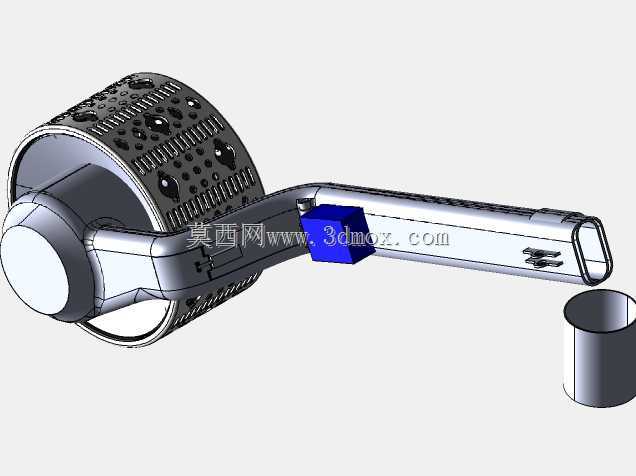




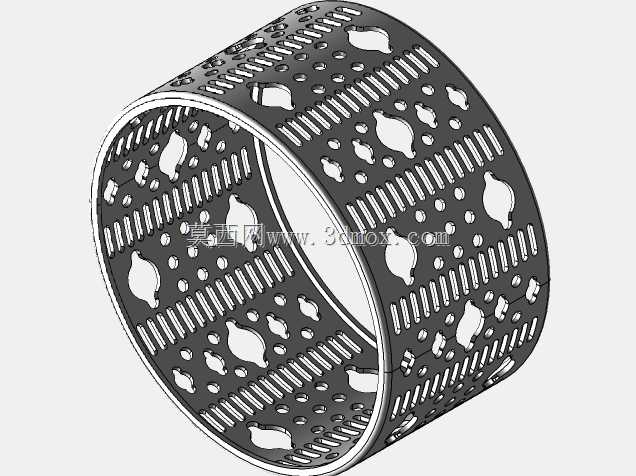


月球车轮表土采样系统月球车轮表土采样系统是一个集成系统,而不是一个完全和专门设计的新系统,专门用于表土采样,尽管它是一个专门的采样系统,这是对现有/现有的着陆器或漫游器进行创新/轻微修改的结果着陆或车轮技术。着陆器或漫游器使用某种技术探测其周围环境(如果着陆器和漫游器本身的手臂是专用的探测机器人,并且具有用于某些功能操作的机械臂)。拟议的设计/想法利用了着陆器或漫游器的这一特点,这使得有价值的取样系统,不是安装在其母路虎或着陆器上的全新取样系统。该系统不需要采用一个全新的系统,而需要对目前正在运行的火星或月球探测器或着陆器的当前设计稍作修改,这使得它非常有用,可供着陆器和月球探测器用于对表土进行取样。该系统由一个车轮系统组成(类似可单独安装在漫游车或着陆器上或稍加调整即可与现有系统集成,从而节省系统的总重量和总功率,改造从车轮的轮胎开始(与目前在路虎车上使用的轮胎类型相似)。这一建议的轮胎设计不包括在其表面上的各种尺寸的通孔,这允许从内到外对表土的钢丝绳范围进行取样。洞的大小和数量都很特别,由于橡胶轮胎的机械性能,它在接触地面时会压缩,这将扩大允许风化层移动的孔,因此可以同时收集和取样各种各样的风化层(在样品尺寸的限制下)在车轮内部,当车轮离开地面时,由于移除轮胎部分的压缩载荷,其孔收缩,因此风化土在车轮内部滞留多年,直到在取样容器/气缸中回收为止。由于孔的大小和排列以及孔的膨胀和收缩的限制(这取决于橡胶轮胎的机械和化学特性),在通过车轮收集时,也会对表土进行取样。因此,第一次取样与表土的沉积/收集操作一起进行。车轮在表面滚动的次数越多,收集表土的机会就越大,这可能会因取样地点的不同而有所不同,车轮的侧面选择得越充分,它将能够收集风化层,即使是在极端的地方,那里的风化层达到所需的大小,数量和质量是有限的。天然橡胶填充物是在橡胶轮胎的周长上打一个小孔后的第二层,具有纵向切口,再次对风化层取样,只允许风化层达到所需的质量,其主要任务是控制进入轮胎的风化层数量轮子。它也像一个阀门,用于更细的表土,如果没有衬垫的话,可以很容易地从车轮轮胎的大孔中冲出。两次取样后,表土向车轮的核心,即车轴移动。在进入车轴之前,风化土必须穿过车轮合金或支撑框架,支撑框架将轮胎和车轴固定在一起。从外部看,这是一种平截头体类型,从内部起到滑动通道/或漏斗的作用,从车轮外层收集表土,并将其运输到车轮轴上。在通过漏斗型滑动合金(其内表面有聚四氟乙烯涂层)转移/运输风化层时,车轮的平截头型外层检查风化层的损失。车轮的轴是一个空心锥形漏斗,允许风化层从合金轮缘穿过的多个通过孔中流动加入。车轴是轮辋/合金的组成部分。车轴的圆锥形引导风化层向一个方向移动,在轮毂方向,另一侧是封闭的,这是狭窄的一侧,有一个微型间谍摄像头用于监测风化层。现在风化层已通过车轴,它现在可以自由移动到车轮的臂部,这是一个空心体,通过轮毂连接/支撑并通过从派生电机(安装在探测车或着陆器的底座/板上)传输功率来派生车轮,因此,不需要单独的命令模块,因为路虎/着陆器可以通过轮臂直接控制对车轮的采样操作,而该轮毂是轮臂的一个组成部分,在一侧从轴上提取风化土,并形成另一侧将其转移到空心臂通道。车轮轮毂有足够的空间储存风化土,直到收集到所需数量和质量的风化土。当风化土收集操作完成时(摄像头告诉命令模块是否达到所需数量和质量),轮臂由旋转电机(通过提供的电机联轴器,直接与电机耦合,并通过拧紧螺栓紧紧固定在臂架上)围绕辊轴提升,这是用于导出车轮的同一个电机(可根据需要使用单独的电机),并且臂轮/月轮将围绕滚动轴(位于月球车/着陆器的地板上)升起,因此在行星重力的影响下,风化层会冲着车轮的升起(方向相反)。这种运动类似于飞机前起落架系统的反冲或倒带。这种运动类似于着陆器和火星车机械臂的运动,通常这样做是为了通过卷起/关闭机械臂并将其储存在火星车或着陆器的身体中,使机械臂免受辐射。除此之外,由于电源有限,这种卷绕/收起操作的速度非常低。这个提议的想法/系统将利用运动和速度,并利用它将风化层通过轮臂转移到取样筒中。在轮的提升/收起操作过程中,风化层被迫逆着,在与上升方向相反的方向上,在空心臂通道的入口处,有一个取样盘,在第三阶段取样之前,将粒径大于1cm的岩石与粒径小于1cm的表土分离,以最终样品中允许的最大数量对表土岩石进行取样。在表土通过臂通道入口和取样盘之后,它现在暴露在几个突然的弯曲中,这将迫使风化层改变其方向,这个弯曲对风化岩有重大影响,因为它相对于风化土粉尘的相对质量更高,它将具有更高的速度,弯曲有机会在允许的最大数量的基础上对岩石进行取样。到达和离开第一个弯道的表土岩石的数量由安装在轮毂和第二个弯道上的微型间谍摄像机监控。由于两个摄像头的综合分析和监控,第一个转弯处的门将打开/或者我们可以说它将关闭(因为它打开了通道,使风化岩石通过移动和关闭通道从手臂通道中移出(再次进入空间),在20块表土岩石通过弯道并向第二个弯道前进后,继续进入臂部通道和取样筒)。门的安装方式使其在两个通道/路线上的作用类似于一个门,当一个通道的门关闭时,另一个通道自动打开。同时,当进行第三次取样操作时,表土粉尘经取样板取样后,安全可靠地沉积在臂槽中。臂和弯管的几何设计使得表土粉尘将继续在通道中移动,而不涉及第三次取样操作。当第一个摄像头(安装在轴上)和第二个摄像头(安装在轮毂上)给出系统中表土岩石的执行间隙时在第三个采样阶段之前,第三个采样将停止。同时,允许通过第三取样阶段的表土岩石和通过而不涉及第三取样阶段的表土粉尘可以自由地通过第二个弯道进入手臂的股骨(最长的直通道,该通道通过衍生工具将车轮连接到月球车或着陆器的主框架)电机)在第三个摄像头(安装在第二个弯道)和重量或密度传感装置的精确监控下。当第二个弯道处的摄像头和传感器显示所需/所需的风化土量已收集并通过第二个弯道时,旋转电机将运行,第四个采样门打开。多余的量(所需/所需的风化土样品除外)在车轮臂的收起运动的影响下通过门倾倒。同时,通过第四阶段取样的风化土样品通过臂-股骨/臂通道被输送到取样筒,当臂处于整个表土样品可以从车轮臂上移动/冲出的位置,同时沿着其滚动轴旋转时,将其放置在臂的旁边(牢固地放置在其在探测车/着陆器底座/地板上的位置)。所有操作(如第三次和第四次取样)均在simu中进行


- 模型大小 :72.67 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,STEP / IGES,Other,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES