

青蛙机器人
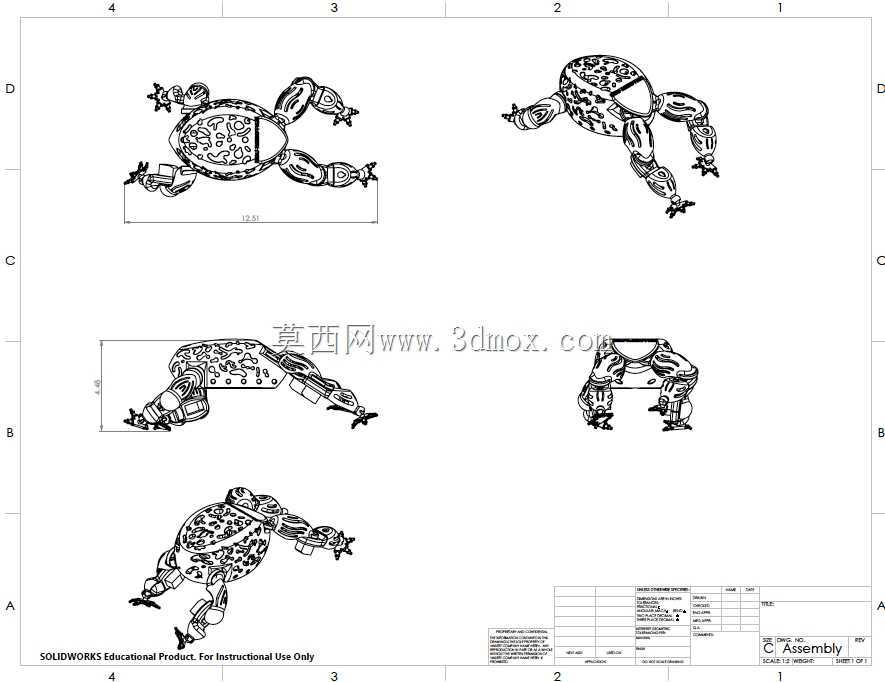












2018年春季,老多米尼大学(MAE-495)仿生机器人,青蛙行走步态模型。用Solidworks设计,校园内用StrataSys 3d打印机打印,用Arduino编码。此帖附有视频示例。注意:打印后脚太细,无法正常工作,因此被移除omponents:-8ea. S3114伺服系统-1ea。为Arduino Uno供电的9V电池。5V可充电AA包电源伺服
------分隔线----------------------------
- 上一篇:三维打印机Prusa p3208mgn12源文件
- 下一篇:蜘蛛侠1

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :28.31 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS


















