八足机器人
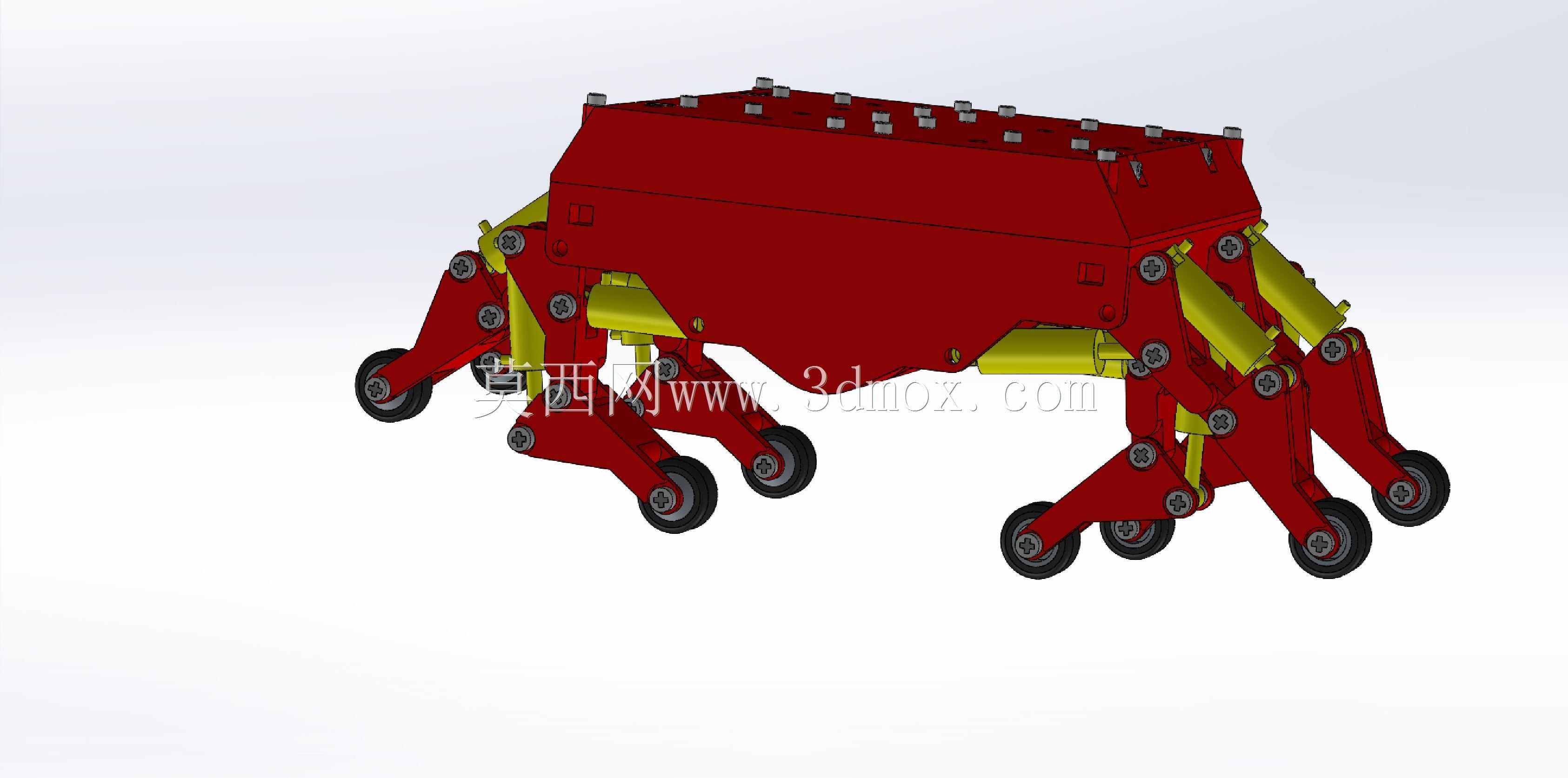
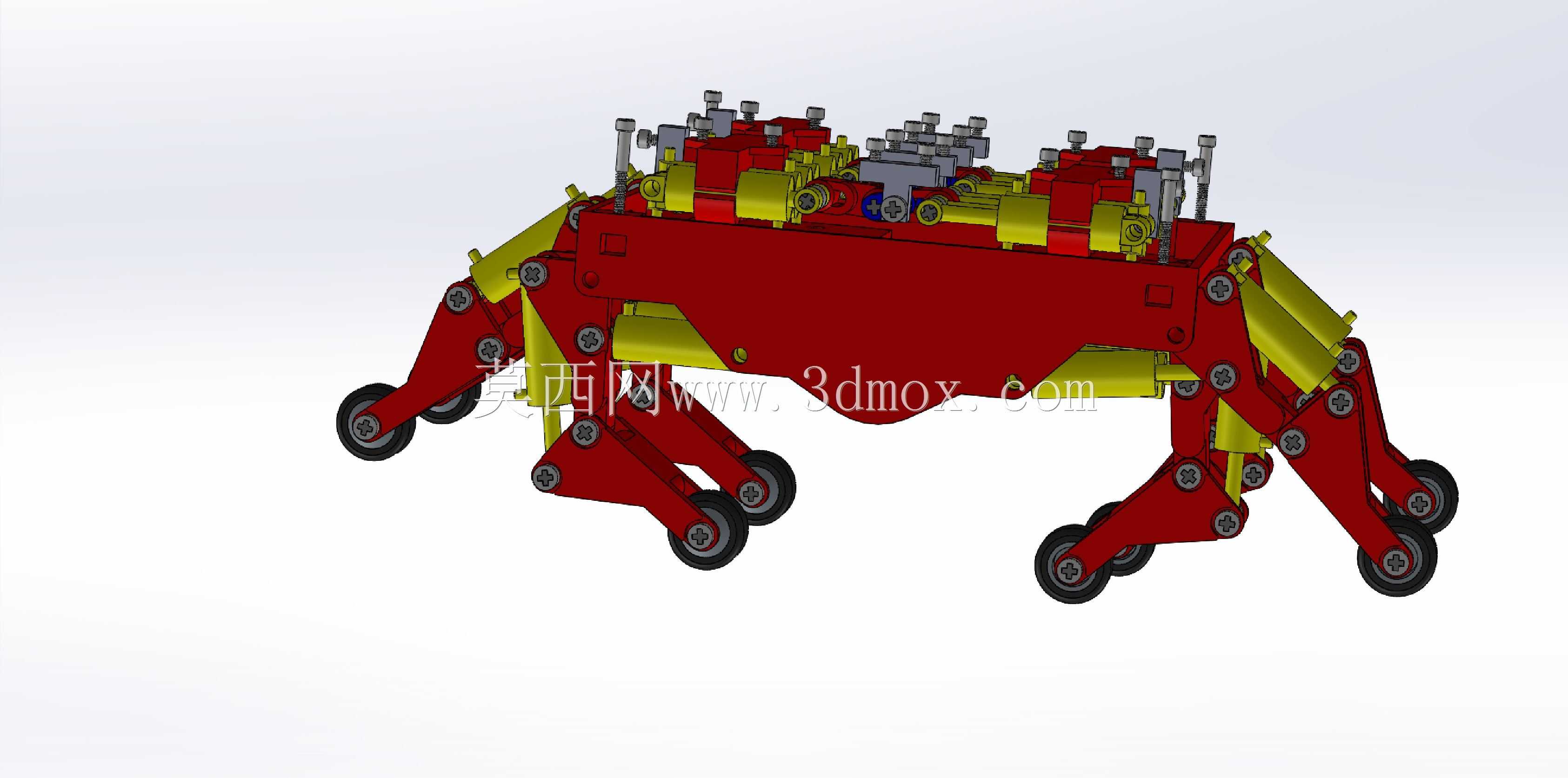
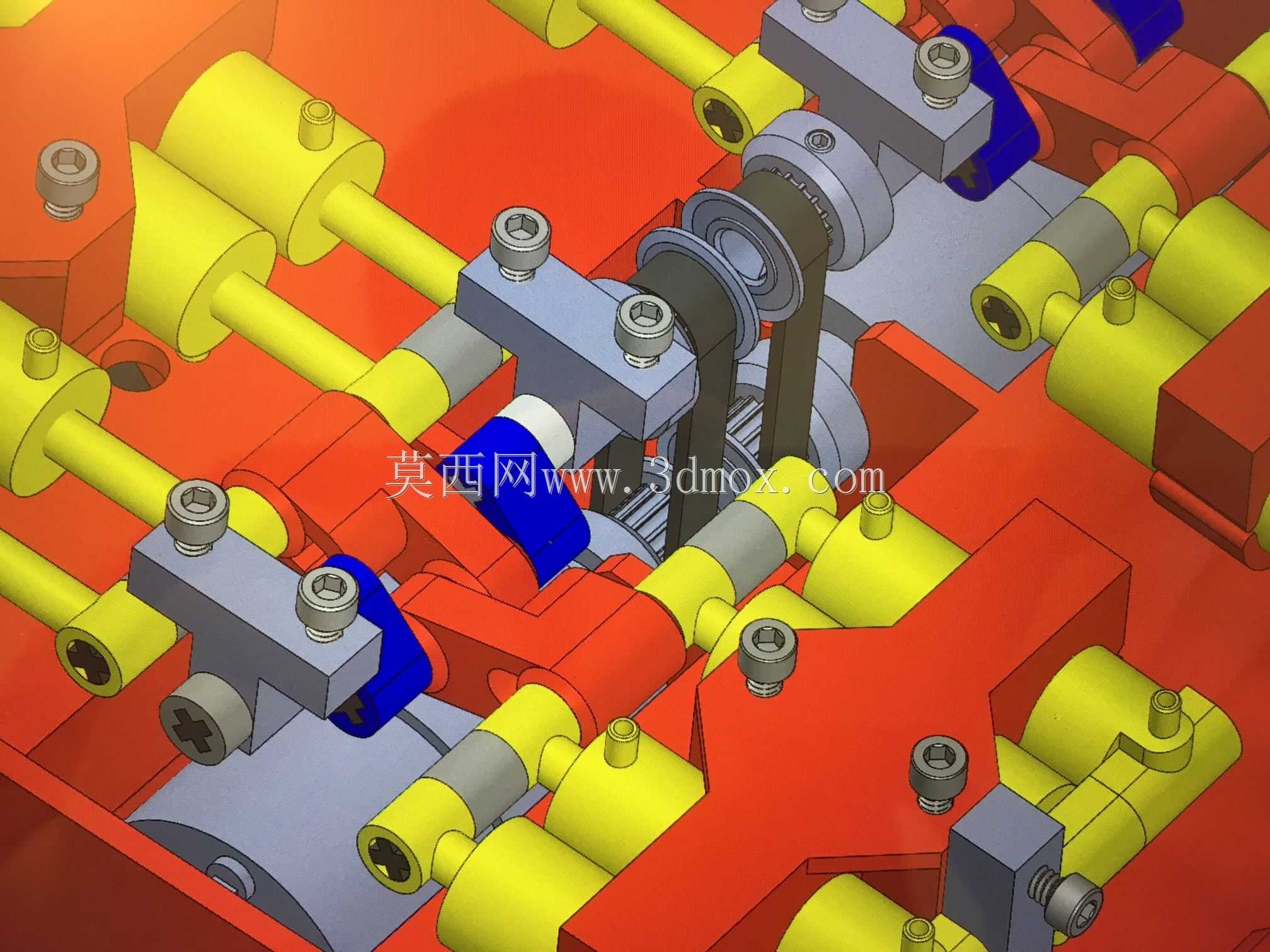
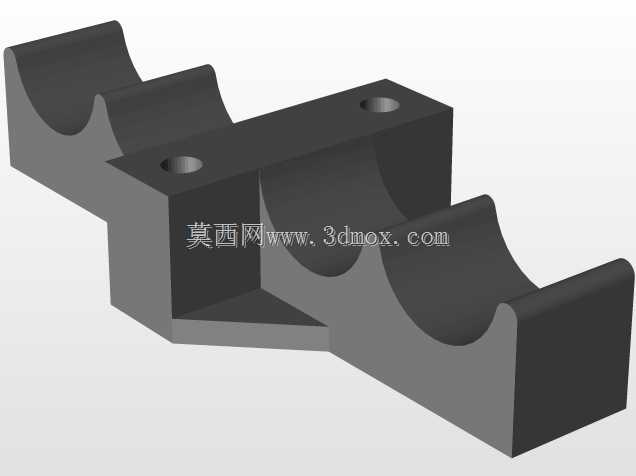
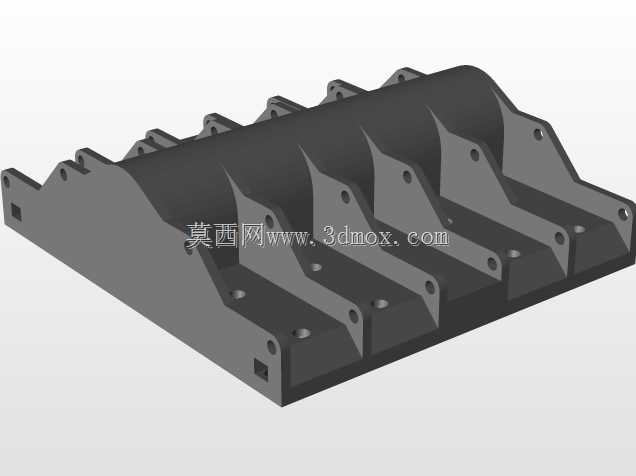

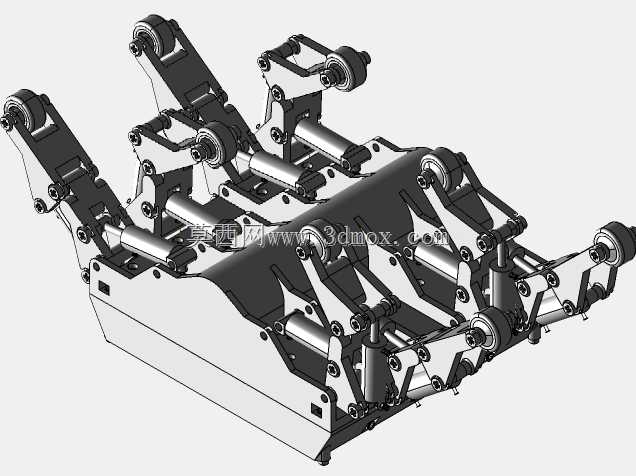
这种装置是一种八脚蹬机器人,比传统机器人能更好地在崎岖的地形上行走。这种机器人通常每条腿使用3个伺服电机,这大大增加了设备的复杂性。这台机器设计得非常简单,高中生可以理解和使用。机器人的八条腿由两个马达驱动。一个电机控制机器人右侧的四条腿,另一个电机控制右侧的腿。右侧的马达转动曲柄,使一组乐高液压活塞振荡。这为腿上的两个乐高液压执行器提供动力。最靠近机器人框架的那一个推动机器人向前,而最远离框架的那一个防止脚把手在后划时拖在地板上。机器人使用八条腿,这样机器人就不需要昂贵而复杂的稳定系统。机器人技术的未来在于腿型机器人,它可以更容易地与专为腿型人类设计的世界互动。有了这个设备,学生们将在腿部机器人的基础上有一个良好的开端。因此,在未来,他们可以利用这一经验制造出能够执行对人类过于危险的任务的机器人,例如在核灾难中操作或在战区拆除炸弹
标签:


- 模型大小 :21.4 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STEP / IGES,Rendering,Other,Rendering,Other,STL,STL,STL,STL,STL,Rendering