

糖果手
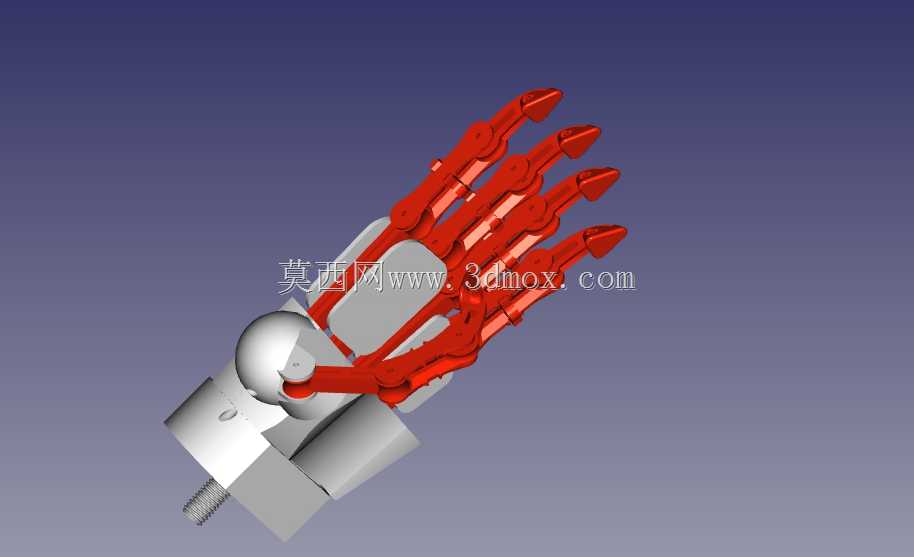
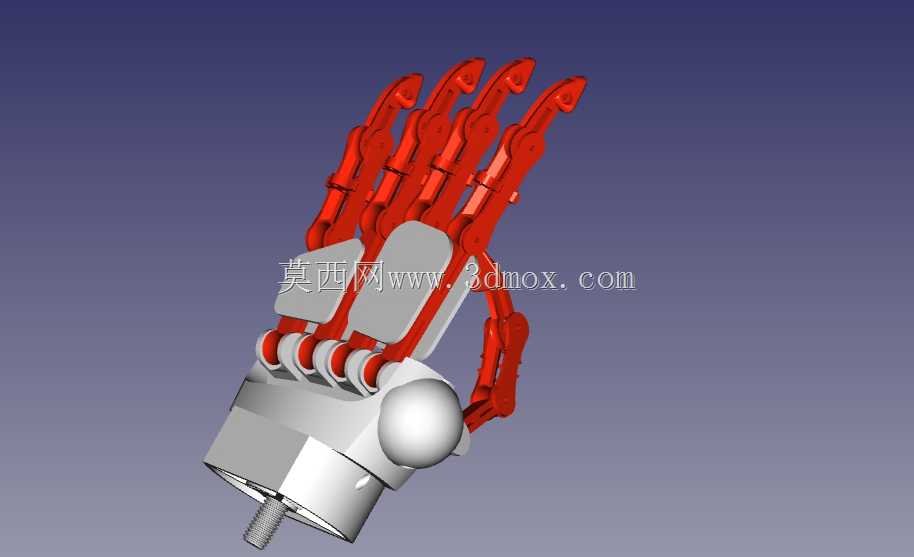

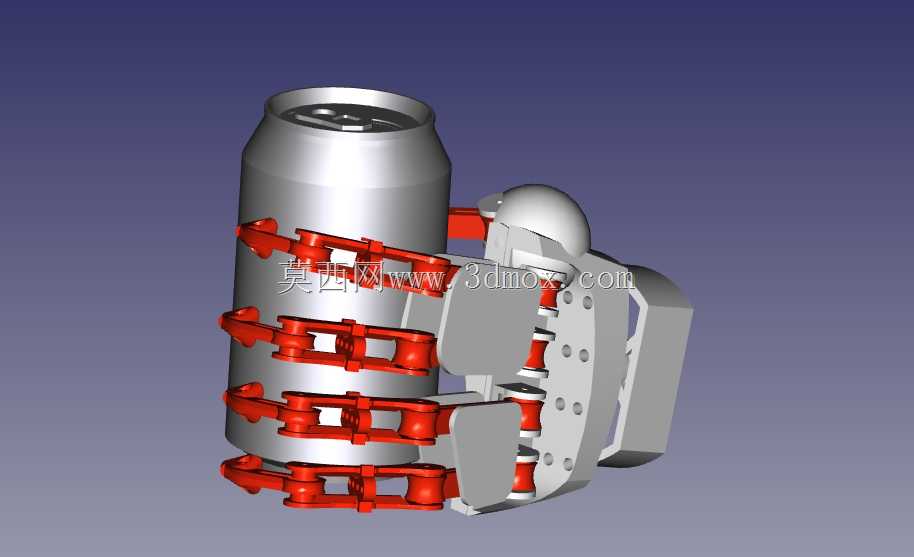








我们是一个来自基辅的志愿者项目,致力于机器人假肢的研究。以前我们主要研究肌电图和运动部件,力学是最薄弱的部分。这个挑战和最后期限鼓励我们更快地工作,并最终设计一些机械:)我们试图使它非常轻和可靠的同时,手指现在是最发达的部分-我们印刷和测试他们,而设计。一些部分没有通过工作,例如,手指没有阻挡突出物,以防止向后移动和封面缺乏坐骑-我们计划使所有的手指和指尖盖。最好用软塑料印刷。我们也花了太多时间在手指上,开始拇指(这是最重要和最复杂的部分)工作太晚,所以拇指和手掌需要进一步发展。对于手掌,我们认为独立和动态的掌骨对手的灵活性和灵巧性起着重要的作用,因此我们添加了它们,作为beta,用手指和手掌套约束。需要滚珠轴承、M3和M2螺栓,以及非柔性强电缆-我们使用Dyneema。我们的team:Dmitry DziubaKseniia 凯里森萨夫丘卡利娜萨夫琴科
标签:


- 模型大小 :53.19 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,Rendering,STEP / IGES,Rendering,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,

















