

H.A.L.P.(帮助所有活着的宠物)

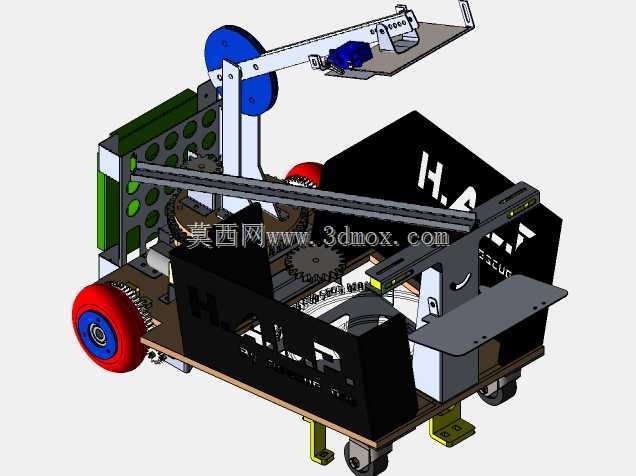







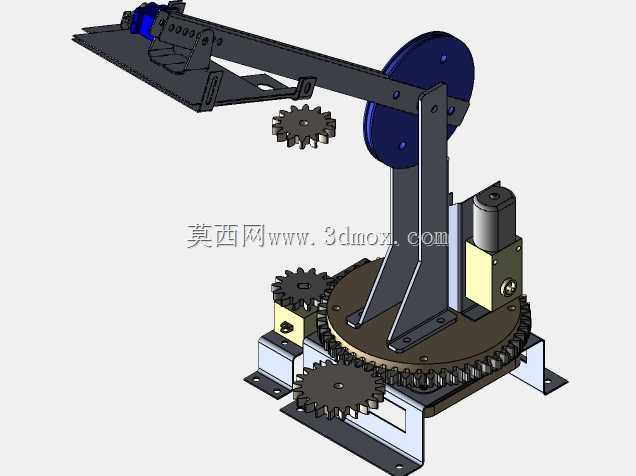
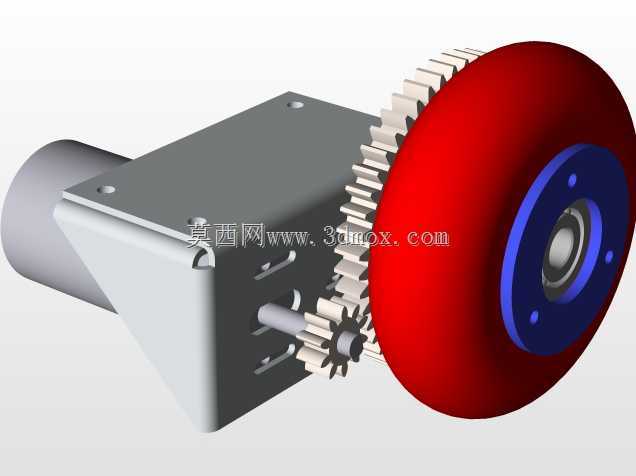


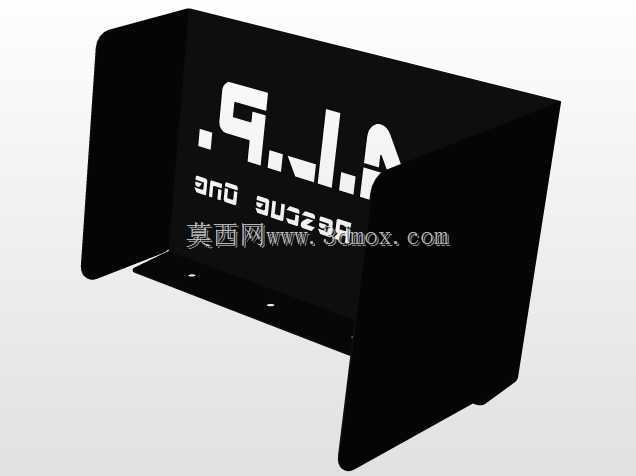
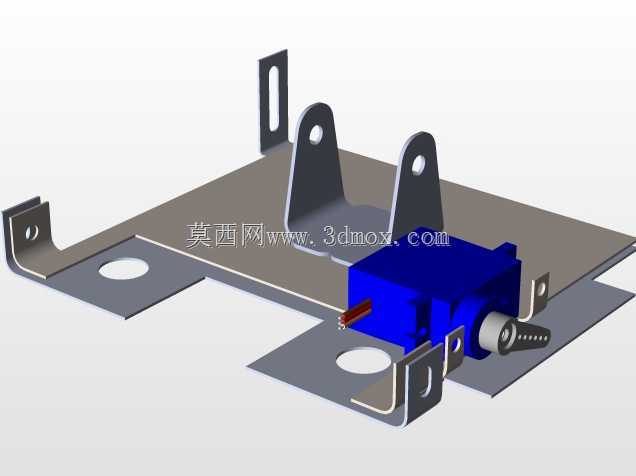
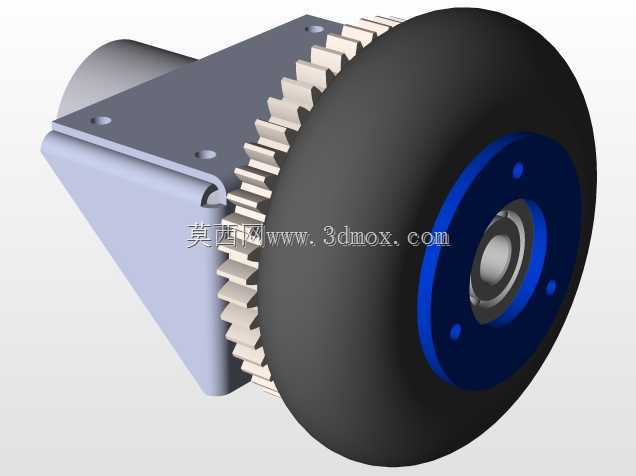
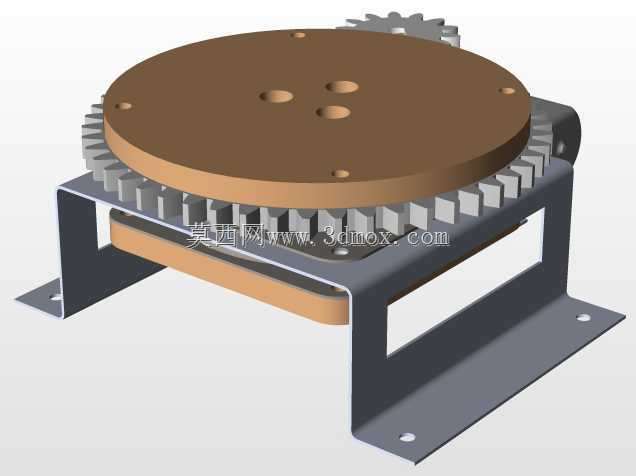








设计、原型和制造一个完全自主的机器人,参加一年一度的第二年工程物理项目课程竞赛。2015年的主题是“宠物救援”,机器人必须沿着赛道自主行走,营救6只放置在赛道不同位置的毛绒玩具动物,并将它们送回起始区的安全地带。我们的机器人H.a.L.P.能够成功且始终如一地拯救所有6只宠物,并在比赛日获得第三名。我们还获得了建造质量和原型设计的最高分数。我们采用机械、电气和软件设计相结合的方法,在5周的时间里从无到有地设计和建造了H.A.L.P。首先利用Solidworks对机器人的机械部件进行了三维建模,然后利用水射流机、激光切割机、三维打印机、钣金弯曲和点焊进行制造。设计了红外信标传感电路和电机驱动电路(H桥)等电气元件,并在原型板上进行了测试和焊接。该机器人的大脑基于Arduino平台,通过控制软件将机械和电气元件连接在一起,控制软件包括车轮编码、主臂和转向的PID控制


- 模型大小 :34.46 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORK

















