

通过Mike Kelly实现RoBo3D自动调平
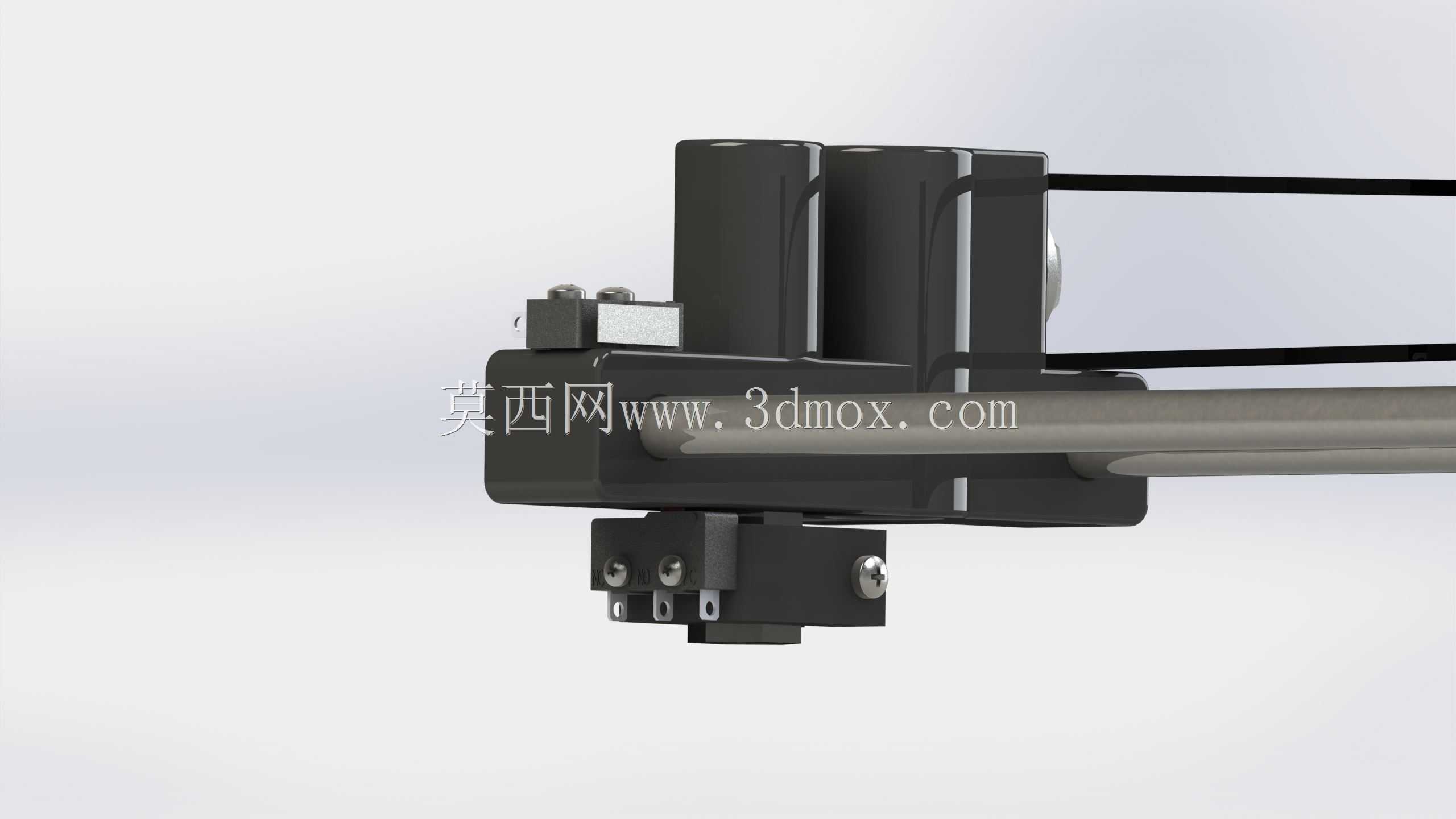
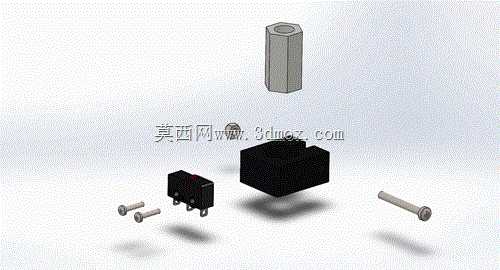
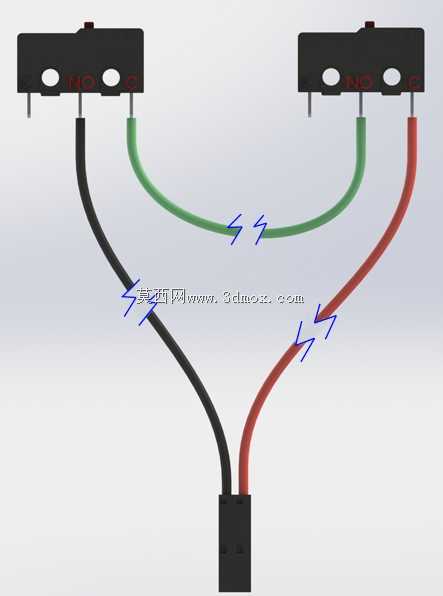

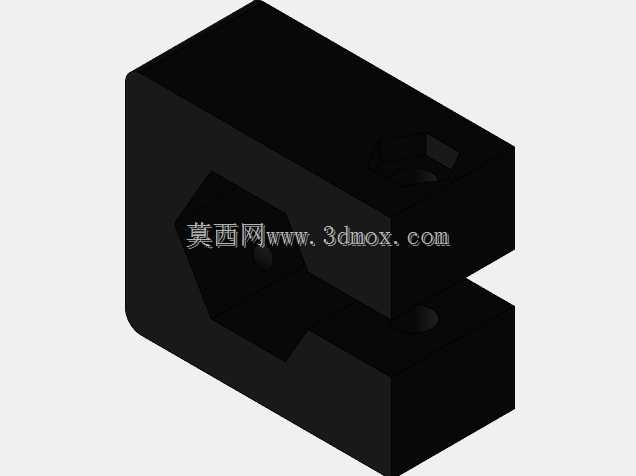
首先,我想说这个mod是团队RoBo的功劳。我决定做我自己的版本的基础上,他们的设计床水平度补偿(ABLC)的问题和nswers:What is 自动床层调平?自动床层调平是指通过机械动作调整床层的水平度,使床层与喷嘴的移动相对平。这与ABLC不同什么是自动床身水平度补偿?ABLC是用测量装置探测床身的过程,以确定床身的水平误差,并通过上下移动Z轴对此进行补偿。没有机械变化,而是软件补偿。为什么称之为自动调平床?可能是为了简单起见。所以我给这个命名为Autolevel。如果你的观点仍然正确的话,删减文字通常是可以接受的works:The Robo3d 有一个安全措施,当喷嘴接触到床身时,螺母会从外壳上脱下来,这样就不会对床身施加压力而“抛出”。这就是人们在“扔螺母”时所说的,利用螺母脱套的原理,他们在螺母的位置上使用了一个连接螺母,并在其上安装了一个开关。开关通过塑料支架与联轴器相连。然后,开关分别针对x电机托架和x惰轮启动。当此开关就位时,只要喷嘴接触到底座并且联接器开始解封,开关将停用,并向坡道板发送一个信号,表明末端止动块已被击中。它同时用于Z0传感器和探头传感器。我的呢differs:With my 设计开关串联运行,以避免出现故障情况。如果开关未正确就位或电线出现故障,RoBo3d将在正常的z操作过程中升起,不会抛出螺母。单击此处查看为什么我在系列中运行交换机。注意:如果您有RoBo3D的自动床位调平,请不要在不修改wiringBuild ITL的情况下使用我的固件ist:2x 5/16“-18联轴节(或公制杆上的M8-1.25联轴节)2x微动开关(除Z轴上的1个外增加1个)2x M3-25mm2x M3螺母4x M2-10mm(除2个外增加2个固定Z开关)Parts:RoBo 3D 自动液位开关座Assembly:Begin by 将开关固定到安装塑料上。在固定开关之前,最好先拧上联轴器。支架应足够膨胀以绕过螺杆。安装支架就位后,固定M3螺母和螺钉并开始拧紧,但如果足够松,塑料仍然可以在联轴器上滑动。调整与惰轮的安装距离,直到开关几乎没有启动。当惰轮压在开关上时,开关应该很容易启动,但一旦联轴节开始脱离,开关就会很快停用。这可能需要一些微调,但一旦你确保它应该保持真实iring:With the 开关到位,是时候接线了。电流自动调平owners:If you 有RoBo3D的自动调平开关,你可以把你的并联开关变成串联,但它需要从NC脚和焊接到无脚脱焊。然后你修剪其中一条腿短(比如红色),然后另一条腿长到足以焊接,然后你修改你的线路来代表下面。新的自动调平owners:Follow the 将开关连接到位的接线图。你很可能需要修剪和焊接,以获得所需的长度。颜色/极性不重要。Attachfull3240控制ItFirmware:With the 开关接线到位是时候改变固件了。这是团队机器人使用的相同的自动级别固件,但是用1个键d进行了修改ifference:const bool Zèu MINèu ENDSTOPèu INVERTING=真;修改为:const bool Z_MIN_ENDSTOP_INVERTING=false;这是传统的。下载下面的固件。使用MatterControl或Arduino软件来刷新固件。还应该注意的是,这个固件可以在任何带有或不带有auto-level.Ca的RoBo 3d上工作libration:With the 固件安装-是时候确定喷嘴接触床身和开关之间的Z偏移了启动。首先将所有轴归零,确保Z轴位于床的中心。使用MC或Repetier将喷嘴一次向上提升0.1毫米,直到您能够将一张纸滑动到其下方,计算它所走的步数。一旦你几乎无法把纸放在下面,就把纸取下来,把喷嘴降低0.1毫米。这是你的Z偏移修改G-code:With the 固件已安装是时候配置Gcode来运行自动级别脚本并校准Z高度了。在G28代码之后的切片器启动程序中插入此代码。[代码]G1 Z0.5;调整Z偏移G92 Z0;定义新的Z homeG29;自动校准床[/code]那应该是所有的东西了。我发现它有助于监测终端G29序列的输出。这样,如果您看到一个不寻常的数字,您可以更快地解决它。请让我知道,如果您有任何问题的硬件销售M8-1.25毫米联轴器的任何人,他们在当地


- 模型大小 :2.59 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STL,Other,Rendering



















