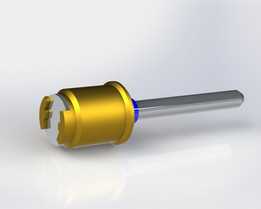
NASA简化收集器

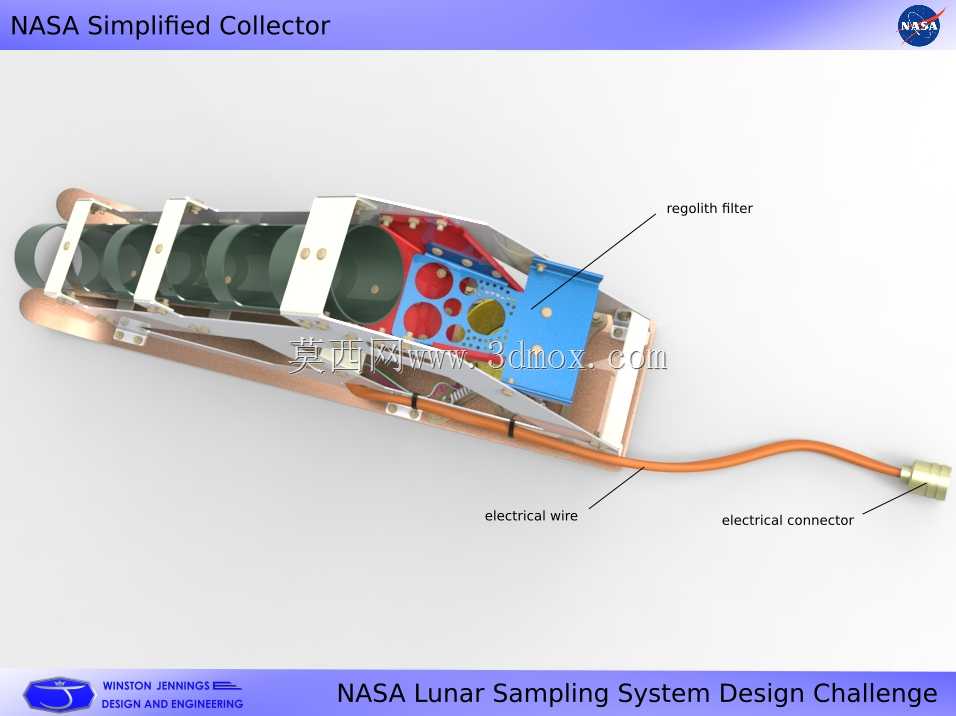
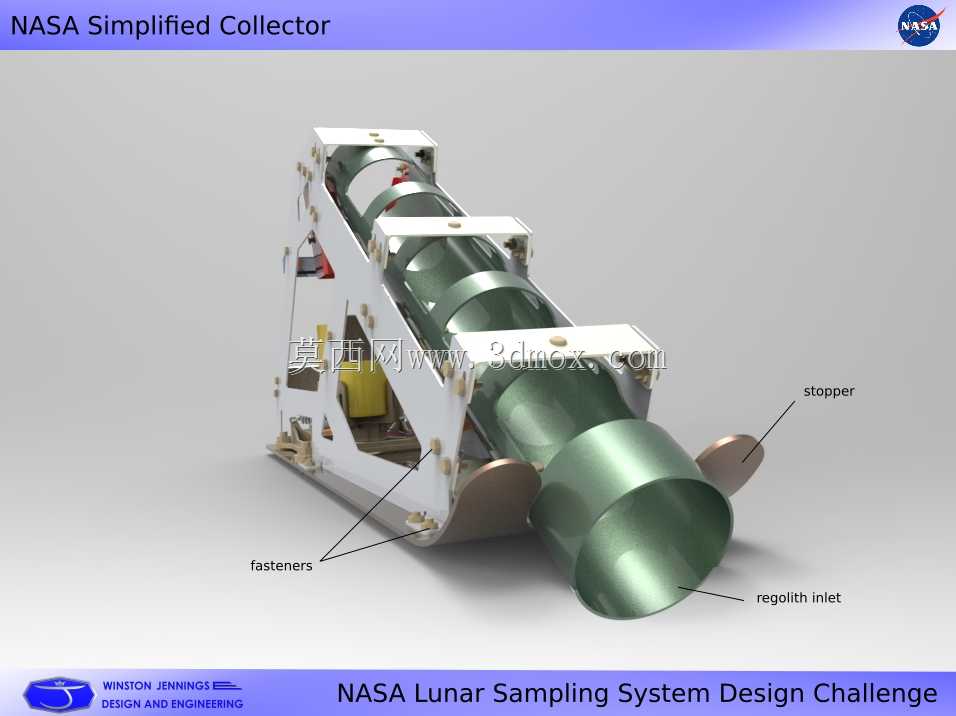
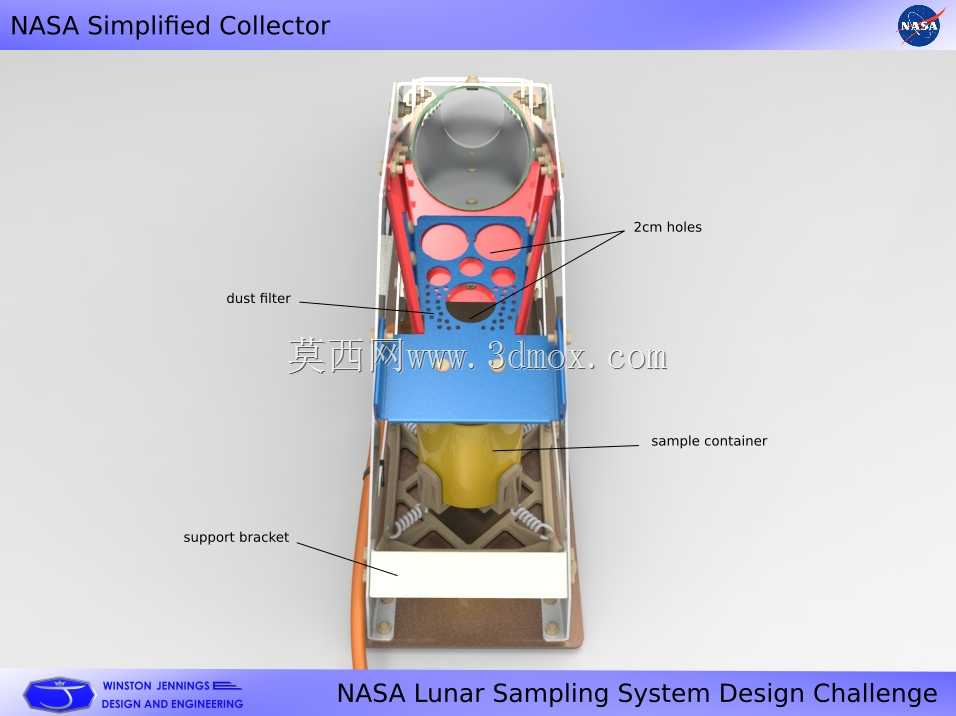
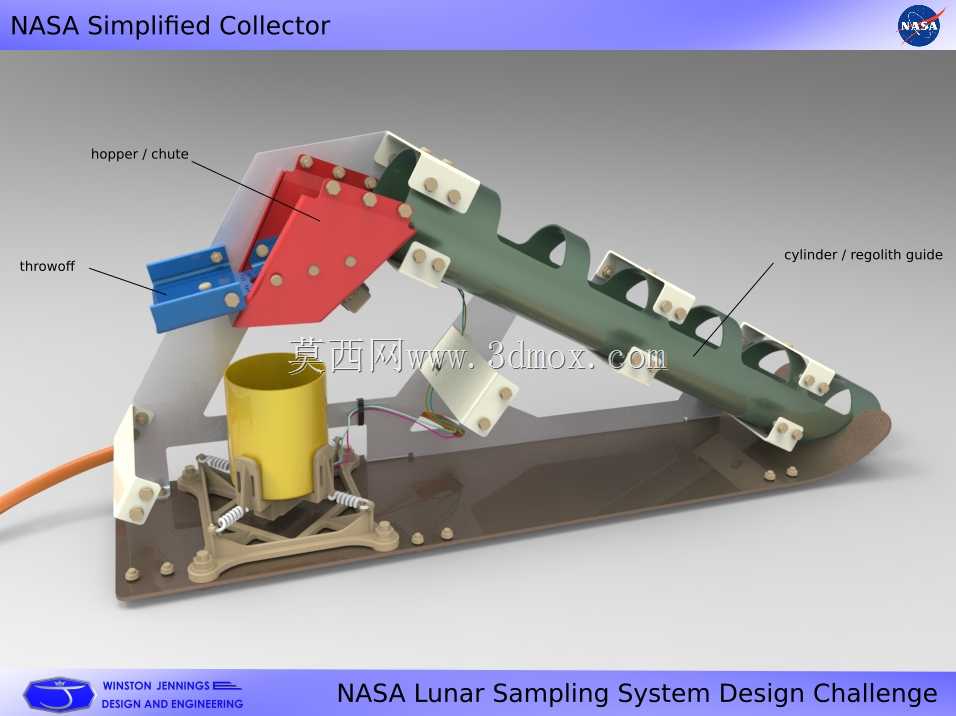
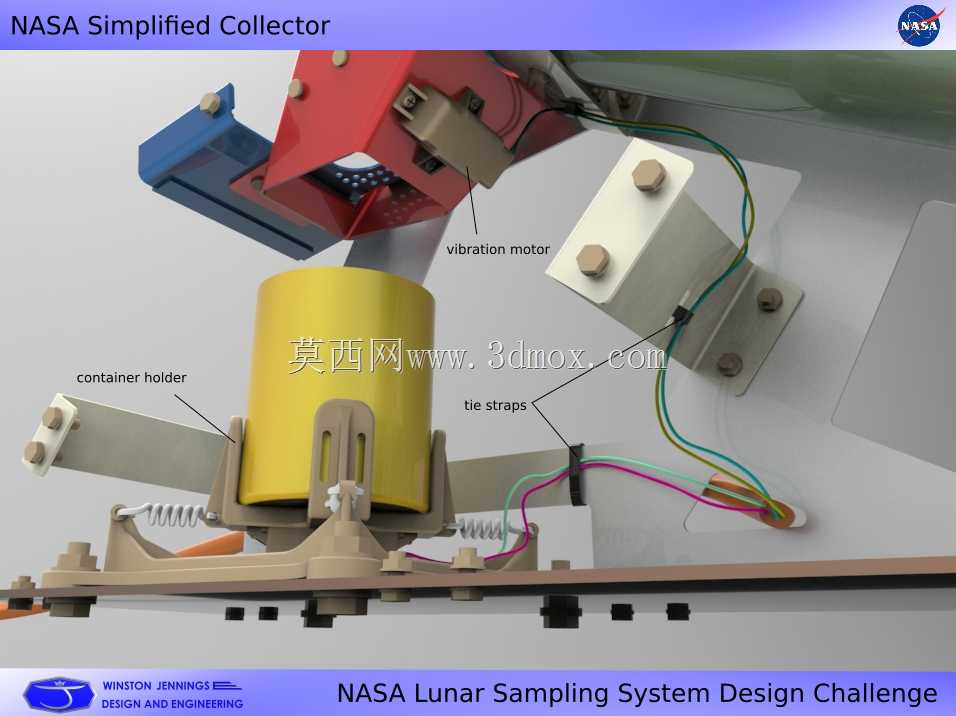
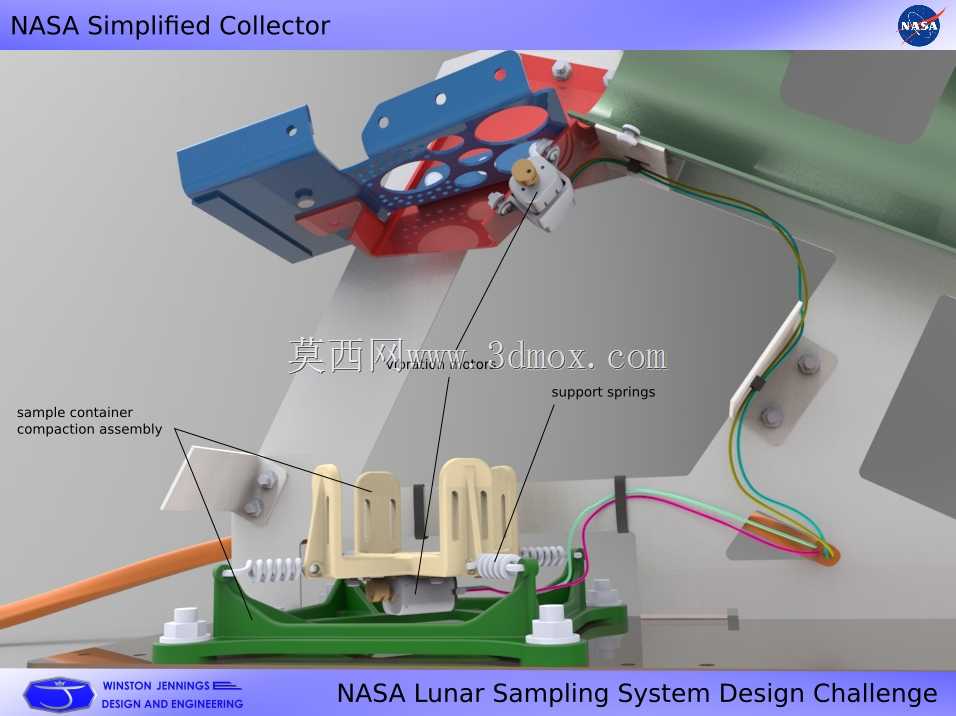
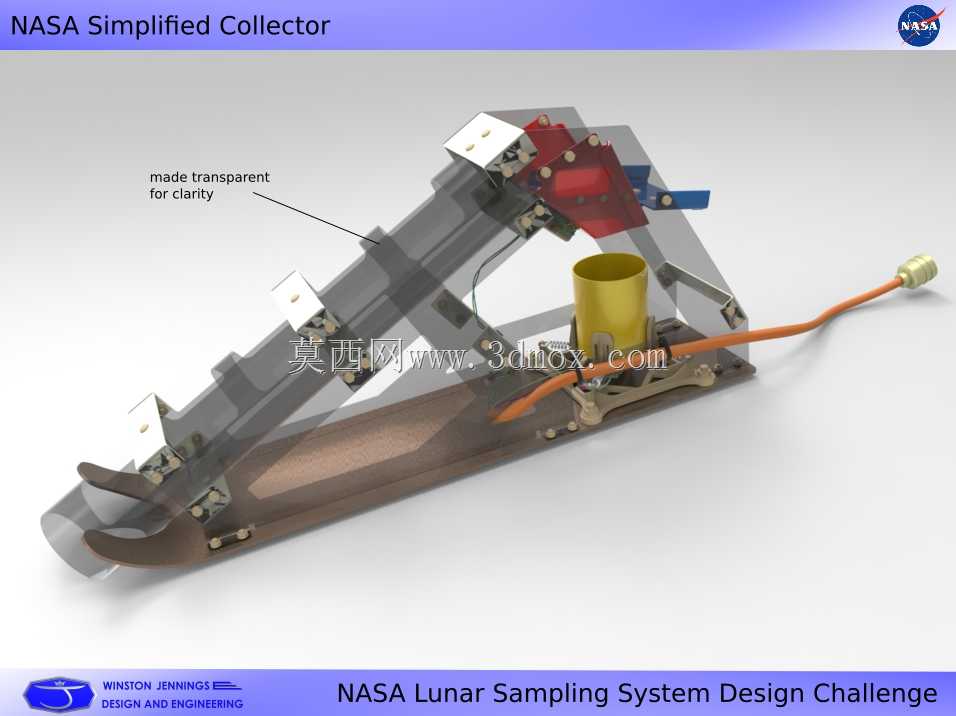
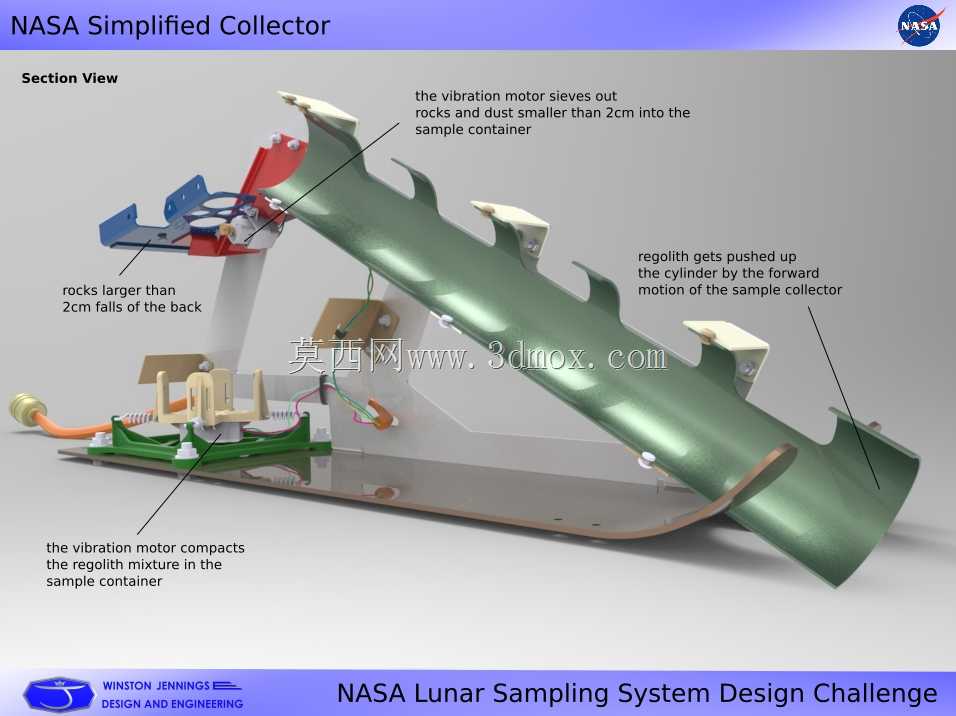
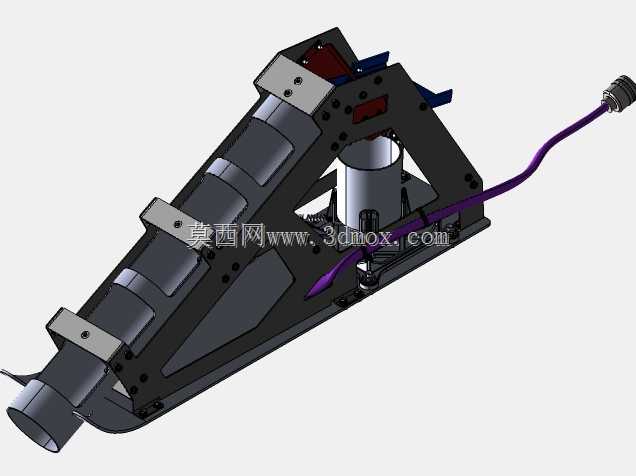

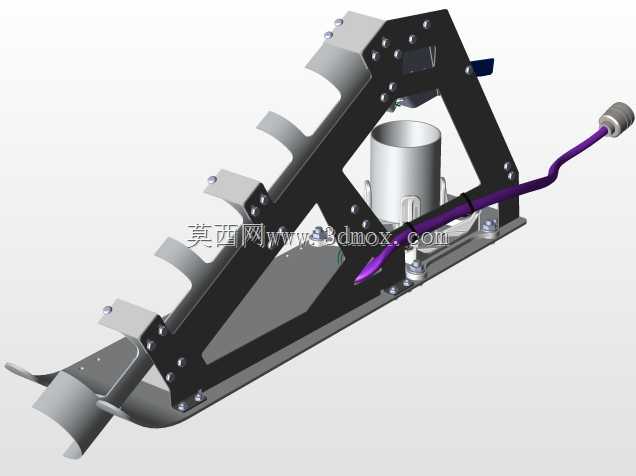
这个概念非常简单,由铝和塑料组成。它被设计用于机械臂。目前,该设计使用激光切割的金属板零件通过螺母和螺栓连接在一起。也许点焊会更好地节省一些重量和简单。此外,使用铝杆和接头可以节省额外的重量。塑料部件是样品容器支架和压实组件。其工作原理是使用机械臂向前推动样品采集器,将表土材料舀到圆筒上。圆筒上可以涂上聚四氟乙烯,以减少风化层的摩擦。振动电机将所需材料筛出放入样品容器中。大于2 cm的多余表土将继续通过过滤器,并从斜槽背面脱落。压实组件由一个样品容器支架组成,样品容器支架由4个张力弹簧悬挂,并通过振动电机压实,以获得所需的结果。对于振动电机,我选择使用功率约为1.5 W的有刷直流电机。总功率将小于3 W。https://www.amazon.com/dp/B00977HHVW/ref=twister_B07GR6KJSP?th=1压实组件确保小于2 cm的细/松散风化层和岩石被很好地包装在样品容器中,直到达到质量和体积要求。样品仅与铝部件接触,装置前部的塞子确保样品采集在月球表层10厘米厚的表土中,相机可以放在装置的后面,在放置样品之前可以看到样品。样品容器的内容物也很容易看到。可以在几分钟内完成收集过程。我的概念不受温度或硬真空的影响。电气连接器与机械臂相连,以提供电源。感谢NASA和GrabCad的设计实践,我真的很享受。祝大家好运,如果您喜欢我的概念,请不要忘记单击“喜欢”按钮。:)看看我的另一个model:NASA Regolith 收集器


- 模型大小 :71.43 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL,STEP / IGES,Rendering